Linear Algebra and Numerical Methods - Concise
MATH50003
Term 1 Content
PDFs
Problem Sheets - Term 1
Problem Sheets - Term 2
Table of contents
- 1 Prelim
- 3 Algebraic and Geometric multiplicities of eigenvalues
- 4 Direct Sums
- 5 Quotient Spaces
- 6 Triangularisation
- 7 The Cayley-Hamilton Theorem
- 8 Polynomials
- 9 The minimal polynomial of a linear map
- 10 Primary Decomposition
- 11 Jordan Canonical Form
- 12 Cyclic Decomposition & Rational Canonical Form
- 13 The Dual Space
- 15 Inner Product Spaces
- 15 Linear maps on inner product spaces
- 16 Bilinear & Quadratic Forms
- NUMERICAL ANALYSIS
- Computing with Numbers
- Numbers
- Binary Representation
- Integers
- Signed Integer
- Variable bit representation
- Division
- Floating Point numbers
- IEEE Floating-point numbers
- Special normal numbers
- Special Numbers
- arithmetic
- Bounding errors in floating-point arithmetic
- arithmetic and Special numbers
- Special functions
- High-precision floating-point numbers
- Differentiation
- Numbers
- Computing with Matrices
- Computing with Functions
Colour Code - Definition are green in these notes, Consequences are red and Causes are blue
Content from MATH40003 assumed to be known.
1 Prelim
Definition - Similar Matrices
$A,B \in M_{n}(F)$ similar $(A \sim B)$ if $\exists$ invertible $P \in M_{n}(F)$ s.t $P^{-1}AP = B$
$\sim$ is an equivalence relation.
Properties of similar Matrices
Same Determinant
Same Char. Poly.
Same eigenvalues
Same rank Same Trace
Definition - Companion Matrix
Let $p(x)$ a monic polynomial of degree $r$; $p(x) = x^{r} + a_{r-1}x^{r-1} + \dots + a_{0}$.
Companion matrix of $p(x)$;
Geometry
Definition - Dot Product $u = (u_{1},\dots,u_{n})$ and $v = (v_{1},\dots,v{n})$\
Length of $u, ||u|| = \sqrt{u\cdot u}$\
Distance between $u$ and $v = \lvert\lvert u-v\rvert\rvert$
$P$ orthogonal if $P^{T}P = I, (Pu\cdot Pv) = u\cdot v)$
$A$ symmetric if $A^{T} = A, (Au\cdot v = u\cdot Av)$
Properties of dot product
linear in $u,v$
symmetric; $u\cdot v = v\cdot u$
$u \cdot v > 0, \forall u,v$
3 Algebraic and Geometric multiplicities of eigenvalues
Definition - Multiplicity of eigenvalues
For $T:V \to V$ a linear map with char. poly. $p(x)$ with roots $\lambda$, Then $\exists$ $a(\lambda)$ $\in \mathbb{N}$ the algebraic multiplicity of $\lambda$ s.t
where $\lambda$ not a root of $q(x)$
Geometric multiplicity $g(\lambda) = dimE_{\lambda}$, for $E_{\lambda}$ the eigenspace of $T$
Theorem 3.2
$dim V = n$, Let $T: V\to V$ a linear map with finite distinct eigenvalues ${\lambda_{i}}_{i=1}^{r}$
Characteristic polynomial of $T$ is
so $(\sum_{i=1}^{r}a(\lambda_{i}) = n$. Following are equivalent
$T$ diagonalisable
$(\sum_{i=1}^{r}g(\lambda_{i}) = n$
$g(\lambda_{i}) = a(\lambda_{i}) \forall i$ (This can be used to test for diagonalisability.)
4 Direct Sums
Define For $ {U_{i}}_{i=1,\dots,k} $ subspaces of vector space $V$. Sum of these subspaces is:
Definition - Direct Sums
$V$ a vector space, ${V_{i}}_{i=1,\dots,k}$ subspaces of vector space $V$. $V$ a direct sum of ${V_{i}}$ if:
If $\forall v \in V$ can be expressed as $v = v_{1} + \dots + v_{k}$ for unique vectors $v_{i} \in V_{i}$
Corollary
Definition - Invariant subspaces
$T: V\to V$ a linear map, $W$ a subspace of $V$.
Write $T_{W}: W \to W$ for the restriction of $T$ to $W$\
Notation - Direct sums of matrices
\[A_{1} \oplus \dots \oplus A_{k} = \begin{pmatrix} A_{1} & &\\ & \ddots & \\ & & A_{k} \end{pmatrix}\]5 Quotient Spaces
Definition - Cosets
$V$ a vector space over $F$, with $W \leq V$ a subspace.
Quotient Space
Define $V/W$ as a vector space of vectors $W + v$ over $F$
Addition; $(W +v_{1}) + (W+ v_{2}) = W+v_{1}+v_{2}$
Scalar Multiplication; $\lambda(W+v) = W + \lambda v$
Can verify this using vector space axioms.
Dimension of $V/W$
Definition - Quotient Map
$T: V \to V$ a linear map, $W$ a $T$-invariant subspace of V. Quotient map: $\bar{T}: V/W: \to V/W$ such that
6 Triangularisation
Lemma - Diagonal Matrices\
Characteristic polynomial of $A$ = $\prod_{i=1}^{n}(x-\lambda_{i})$, eigenvalues $={\lambda_{i}}$
$detA = \prod_{i=1}^{n}\lambda_{i}$
$AB$ also upper triangular, with $diag(AB) = \lambda_{1}\mu_{1},\dots,\lambda_{n}\mu_{n}$
Theorem 6.2 - Triangularisation Theorem
$V$ an $n$ dimensional vector space over $F$, $T:V \to V$ a linear map,
Where $\chi(T) = \prod_{i=1}^{n}(x-\lambda_{i})$, where $\lambda_{i} \in F \ \forall i$ $\implies \exists$ basis $B$ of $V$ s.t $[T]_{B}$ upper triangular
7 The Cayley-Hamilton Theorem
Theorem. 7.1 - (Cayley-Hamilton Theorem)
$V$ a finite dimensional vector space over $F$. $T: V \to V$ a linear map with char. poly. $p(x)$
8 Polynomials
Definition - Polynomials over a field
$F$ a field,$p(x)$ over $F$, for $p(x) = \sum_{i}a_{i}x^{i}, F[x] = { p(x) : a_{i} \in F}$
Degree of polynomial
$deg(p(x)) =$ the highest power of $x$ in $p(x)$
Euclidean Algorithm
$f,g \in F[x]$ with $deg(g) \geq 1$, Then $\exists q,r \in F[x] s.t$
Definition - Greatest Common Divisor (GCD) of polynomials
$f,g \in F[x] \backslash {0}$, Say $d\in F[x]$ the gcd of $f,g$ if:
$d\lvert f$ and $d\lvert g$
if $e(x) \in F[x]$ and $e\lvert f$ and $e\lvert g$ Then $e\lvert d$
Say $f,g$ are co-prime if $gcd(f,g) = 1$
Corollary
$d = gcd(f,g) \implies \exists r,s \in F[x] \text{ s.t } d = rf + sg$
Definiton - Irreducible polynomials
$p(x) \in F[x]$ irreducible over $F$ if $deg(p) \geq 1$ and $p$ not factorisable over $F$ as a product of ${f_{i}} \in F$ s.t $deg(f_{i}) \leq deg(p)$
Corollary
$p(x) \in F[x]$ irreducible, ${g_{i}} \in F[x]$, if $p|g_{1}\dots g_{r} \implies p|g_{i} \text{ for some } i$
Theorem 8.7 - (Unique Factorization Theorem)
$f(x) \in F[x]$ s.t $deg(f) \geq 1$
\[f = p_{1}\dots p_{r}\]where each $p_{i} \in F[x]$ irreducible. Factorisation of $f$ is unique up to scalar multiplication
9 The minimal polynomial of a linear map
Definition - Minimal polynomial Say $m(x) \in F[x]$ a minimal polynomial for $T: V \to V$ if
$m(T) = 0$
$m(x)$ monic
$deg(m)$ is as small as possible s.t (i) and (ii)
Properties of the minimal polynomial
For $T$ a linear map, its minimal polynomial $m_{T}(x)$ is unique
$p(x) \in F[x], p(T) = 0 \iff m_{T}(x)\lvert p(x)$
$m_{T}(x)\lvert c_{T}(x)$ the char. poly. of $T$
$\lambda \in F$ a root of $c_{T}(x) \implies \lambda$ a root of $m_{T}(x)$
$A,B \in M_{n}(F)$ s.t $A \sim B \implies m_{A}(x) = m_{B}(x)$
Theorem 9.3
$p(x) \in F[x]$ an irreducible factor of $c_{T}(x) \implies p(x)|m_{T}(x)$
Corollaries
$c_{T}(x) = c_{T_{W}}(x)c_{\bar{T}}(x)$
$m_{T_{W}}(x)$ and $m_{\bar{T}}(x)$ both divide $m_{T}(x)$
10 Primary Decomposition
Theorem 10.1 - (Primary Decomposition Theorem)
$V$ a finite dimensional vector space over $F$, $T:V\to V$ a linear map with $m_{T}(x)$
Let factorisation of $m_{T}(x)$ into irreducible polynomials be:
Where ${f_{i}(x)}$ all distinct irreducible polynomials in $F[x]$
For $1 \leq i \leq k$, define:
Then
$V = V_{1} \oplus \dots \oplus V_{k}$ (Call this the primary decomposition of $V$ w.r.t $T$
each $V_{i}$ is $T$-invariant
each restriction $T_{V_{i}}$ has minimal polynomial $f_{i}(x)^{n_{i}}$
In the case where each $f_{i}(x) = (x-\lambda_{i})$
With $\lambda_{i}$ distinct eigenvalues of $T$ and $V_{i} = ker(T-\lambda_{i}I)^{n_{i}}$
We call $V_{i}$ the generalised $\lambda_{i}$-eigenspace of T
Corollary
A linear map $T:V \to V$ diagonalisable $\iff m_{T}(x) = \prod_{i=1}^{k}(x-\lambda_{i})$ a product of distinct linear factors
Corollary
For $T:V \to V$ a linear map, with $g_{1}(x),g_{2}(x) \in F[x]$ coprime polynomials s.t $g_{1}(T)g_{2}(T) = 0$
Then $V = V_{1} \oplus V_{2}$, where $V_{i} = ker g_{i}(T), i = 1,2$ with each $V_{i}$ being $T$-invariant
Suppose $m_{T}(x) = g_{1}(x)g_{2}(x) \implies m_{T_{V_{i}}}(x) = g_{i}(x), i = 1,2$
11 Jordan Canonical Form
Definition - Jordan Block
$F$ a field and let $\lambda \in F$. Define $n\times n$ matrix:
Properties of the Jordan Blocks
characteristic and minimal polynomials of $J$, $= (x-\lambda)^{n}$
$\lambda$ the only eigenvalue of $J$, with $a(\lambda) = n, g(\lambda) = 1$
$J-\lambda I = J_{n}(0)$, multiplication by $J-\lambda I$ sends basis vectors as such: \(e_{n} \to e_{n-1} \to \dots \to e_{2} \to e_{1} \to 0\)
$(J-\lambda I)^{n} = 0$, and for $i < n$, $rank((J-\lambda I)^{i}) = n-i$. And under multiplication: \(e_{n} \to e_{n-i}, e_{n-1} \to e_{n-i-1} \dots\)
Lemma
Let $A = A_{1} \oplus \dots \oplus A_{k}$ for each $i$ let $A_{i}$ have char. poly $c_{i}(x)$ and min. poly. $m_{i}(x)$.
$c_{A}(x) = \prod_{i=1}^{k}c_{i}(x)$
$m_{A}(x) = lcm(m_{1}(x),\dots,m_{k}(x))$
$\forall \lambda$ eigenvalues of A, $dim E_{\lambda}(A) = \sum_{i=1}^{k}dimE_{\lambda}(A_{i})$
$\forall q(x) \in F[x]$, $q(A) = q(A_{1}) \oplus \dots \oplus q(A_{k})$
Theorem 11.3 - (Jordan Canonical Form)
$A \in M_{n}(F)$, suppose $c_{A}(x)$ a product of linear factors over $F$.
Then
- $A$ similar to matrix of form
- Matrix $J$ from above, is uniquely determined by $A$ up to order of Jordan blocks
Computing the JCF
JCF theorem says $A \sim J$, a JCF matrix.
$A \sim J \implies$ same characteristic polynomial, eigenvalues, geometric multiplicities, minimal polynomial and $q(A) \sim q(J)$ for any polynomial $q$.
For each eigenvalue $\lambda$, collect all Jordan blocks as such;
Properties of JCF
$J$ as above, $\lambda$ an eigenvalue;
$n_{1} + \dots + n_{a} = a(\lambda)$
$a$ = number of $\lambda$-blocks = $g(\lambda)$
max$(n_{1},\dots,n_{a}) = r$, where $(x-\lambda)^{r}$ the highest power of $(x-\lambda)$ dividing $m_{A}(x)$
Theorem 11.6.
$T: V \to V$ a linear map s.t $c_{T}(x)$ a product of linear factors $\implies \exists$ basis $B$ of $V$ s.t $[T]_{B}$ a JCF matrix
Definition - Nilpotent Matrix
$A^{k} = 0$ for some $k \in \mathbb{N}$
Theorem 11.7.
$S:V \to V$ a nilpotent linear map $\implies \exists$ basis $B$ of $V$ s.t
Computing a Jordan Basis
Finding the Jordan Basis $B$ as above.
We have $V = V_{1} \oplus \dots \oplus V_{k}$ by Primary Decomposition Theorem.
Take each restriction $T_{V_i}$ each with $1$ eigenvalue.
Let $S_{i} = T_{V_i} - \lambda_{i}I$ so each $S_{i}$ nilpotent.
- Step 1 - Compute subspaces
$$V \supset S(V) \supset S^{2}(V) \supset \dots \supset S^{r}(V) \supset 0$$ $S^{r+1}(V) = 0$
Step 2 - Find basis of $S^{r}(V)$, Using the following rules extend to basis of $S^{r-1}(V)$:
Given basis $u_{1},S(u_{1}),\dots,S^{m_{1}-1}(u_{1}),\dots u_{r},S(u_{r}),\dots,S^{m_{r}-1}(u_{r})$
for each $i$ add vector $v_i \in V$ s.t $u_i = S({v_i})$
note $ker(S)$ contains linearly independent vectors
$$S^{m_{1}-1}(u_{1}),\dots,S^{m_{r}-1}(u_{r})$$ extend to basis of $ker(S)$ by adding vectors $w_{1},\dots,w_{s}$ with dim$ker(S) = r+s$
Yielding$$v_{1},S(v_{1}),\dots,S^{m_{1}}(v_{1}),\dots,v_{r},S(v_{r}),\dots,S^{m_{r}}(v_{r}),w_{1},\dots,w_{s}$$
- Step 3 - Repeat successively finding Jordan bases of $S^{r-2},\dots,S(V),V$
12 Cyclic Decomposition & Rational Canonical Form
Definition - Cyclic Subspaces
$V$ a finite dimensional vector space over $F$, and $T:V \to V$ a linear map.
Let $0 \neq v \in V$ and define
Say $Z(v,T)$ the $T$-cyclic subspace of $V$ generated by $v$.
$Z(v,T)$ is $T-$invariant. Write $T_{v}$
Definition - $T$-annihilator of $v$ and $Z(v,T)$
Considering, $v,T(v),T^{2}(V),\dots$ with $T^{k}(v)$ first vector in span of previous ones
$T-$annihilator of $v$ and $Z(v,T)$ is
This is monic polynomial of smallest degree s.t $m_{v}(T)(v) = 0$ also with $m_{v}(T)(w) = 0\ \forall w \in Z(v,T)$
Theorem 12.2. (Cyclic Decomposition Theorem)
$V$ a finite dimensional vector space over $F$
$T:V \to V$ a linear map. Suppose $m_{T}(x) = f(x)^{k}$ for irreducible $f(x) \in F[x]$
$\implies \exists v_{1},\dots,v_{r} \in V$ s.t
where
each $Z(v_{i},T)$ has $T$-annihilator $f(x)^{k_i}$ for $1\leq i \leq r,\ k = k_{1} \geq k_{2} \geq \dots \geq k_{r}$
$r$ and $k_{1},\dots,k_{r}$ uniquely determined by $T$
Corollary 12.3
$T$ a finite dimensional vector space over $F$
$\implies \exists$ basis $B$ of $V$ s.t
Corollary 12.4
$A \in M_{n}(F)$, with $m_A(x) = x^{k}$
Theorem 12.5. (Rational Canonical Form Theorem)
$V$ be finite dimensional over field $F$ with $T:V \to V$ a linear map with
\[m_{T}(x) = \prod_{i=1}^{t}f_{i}(x)^{k_i}\]with ${f_{i}(x)}_{i=1}^{t} \in F[x]$ set of distinct irreducible polynomials $\implies \exists$ basis $B$ of $V$ s.t
\[\begin{aligned} [ T ]_{B} &= C(f_{1}(x)^{k_{11}}) \oplus \dots \oplus C(f_{1}(x)^{k_{1r_1}}) \oplus \dots\\ & \oplus C(f_{t}(x)^{k_{t1}}) \oplus \dots \oplus C(f_{t}(x)^{k_{tr_{t}}})\end{aligned}\]where for each $i$
\[k_{i} = k_{i1} \geq \dots \geq k_{ir_{i}}\]with $r_{i}$ and $k_{i1},\dots,k_{ir_{i}}$ uniquely determined by $T$
Corollary 12.6
$A \in M_{n}(F)$ s.t $m_{A}(x) = \prod_{i=1}^{t}f_{i}(x)^{k_{i}}$ distinct irreducible polynomials.
$\implies A \sim C(f_{1}(x)^{k_{11}}) \oplus \dots \oplus C(f_{1}(x)^{k_{1r_1}}) \oplus \dots \oplus C(f_{t}(x)^{k_{t1}}) \oplus \dots \oplus C(f_{t}(x)^{k_{tr_{t}}})$
Computing the RCF
$T:V \to V$ we have
${f_{i}(x)}$ all distinct irreducible polynomials in $F[x]$
enough to find; $rank(f_{i}(T)^{r}) \forall i \in {1,\dots,t }, 1\leq r \leq k_{i}$
13 The Dual Space
Definition - Linear functional $V$ a vector space over $F$
A linear functional on $V$ a linear map $\phi: V \to F$ s.t
Operations of linear functionals
$(\phi_1 + \phi_2)(v) = \phi_1(v) + \phi_2(v), \qquad \forall v \in V$
$(\lambda\phi)(v) = \lambda\phi(v),\qquad \forall \lambda \in F, \forall v \in V$
Definition - The Dual Space
$V^{*}$ a vector space over $F$ w.r.t above multiplication and addition.
Dimension
${ v_{i} }{i} $ a basis of $V$ with eigenvalues ${ \lambda }{i}$
$\exists! \phi \in V^*$ sending $v_i \to \lambda_i$
\[\phi(\sum \alpha_i v_i) = \sum \alpha_i \lambda_i\]Proposition 13.1
Let $n = dim V$ with ${v_1,\dots,v_n}$ a basis of $V$\
$\forall i$ define $\phi_{i} \in V^*$ by
$\implies \phi_i(\sum \alpha_{j}v_{j}) = \alpha_{i} \implies {\phi_1,\dots,\phi_n}$ a basis of $V^{}$ the dual basis of $B$
$ dim V^{} = n = dim V $
Definition - Annihilators
$V$ a finite dimensional vector space over $F$ and $V^*$ the dual space. $X \subset V.$ Say annihilator $X^0$ of $X:$
$X^0$ a subspace of $V^*$
Proposition 13.2.
$W$ subspace of $V \implies dim W^0 = dim V - dim W$
15 Inner Product Spaces
Definition - Inner Product
$F = \mathbb{R}$ or $\mathbb{C}$. $V$ a vector space over $F$
Inner product on $V$ a map $(u,v): V \times V \to F$ satisfying
$(\lambda_1v_1 + \lambda_2v_2, w) = \lambda_1(v_1,w) + \lambda(v_2,w)$
$(w,v) = \bar{(w,v)}$
$(v,v) > 0$ if $v \neq 0$
$\forall v_i,v,w \in V$ and $\lambda_{i} \in F$. Call such a vector space $V$ with inner product $(,)$ an inner product space
Properties of Inner Product Space
right-linear for $F = \mathbb{R}$; $(v, \lambda_1w_1+\lambda_2w_2) = \bar{\lambda_1}(v,w_1) + \bar{\lambda_2}(v,w_2)$
$(v,v) \in \mathbb{R}$
$(0,v) = 0\ \forall v \in V$
symmetry; $F = \mathbb{R}\implies (w,v) = (v,w)$
$(v,w) = (v,x) \forall v \in V \implies w=x$
Matrix of an inner product
$V$ a finite dimensional inner product space. $B = {v_1,\dots,v_n}$ a basis.
Defining $a_{ij} = (v_i,v_j)$. So we have $a_{ji} = \bar{a_{ij}}$
$\mathbb{R}\implies A$ symmetric
$\mathbb{C}\implies A$ hermitian
$\ v,w \in V \implies (v,w) = [v]{B}^{T} A[\bar{w}]{B} $
Definition - Positive definite
Hermitian matrix $A$ positive-definite if
$x^TA\bar{x} > 0\ \forall$ non-zero $x \in F^{n}$\
Proposition 14.1
For $u,v,w \in V$ we have
$\lvert(u,v)\rvert \leq \lvert\lvert u\rvert\rvert\lvert\lvert v\rvert\rvert$ (Cauchy-Schwarz Inequality)
$\lvert\lvert u+v \rvert\rvert \leq \lvert\lvert u\rvert\rvert + \lvert\lvert v\rvert\rvert$
$\lvert\lvert u-v\rvert\rvert \leq \lvert\lvert u-w\rvert\rvert + \lvert\lvert w-v\rvert\rvert$ (Triangle inequalities)
Dual Space
Let $V$ an inner product space over $F = \mathbb{R}\text{ or }\mathbb{C}$
$v \in V$ define
$\implies f_v$ linear functional $\in V*$
Definition - $\bar{V}$ $\bar{V}$ has same vectors as $V$
Addition in $\bar{V}$ same as $V$
Scalar multiplication; $\lambda * v = \bar{\lambda}v$
Proposition 14.2.
$V$ finite-dimensional. Define $\pi : \bar{V} \to V*$ as
$\implies \pi$ a vector space isomorphism\
Definition - Orthogonality
${v_1,\dots,v_k}$ orthogonal if $(v_i,v_j) = 0\ \forall i,j\ i\neq j$
Orthonormal if also $||v_i|| = 1\ \forall i$\
Definition - $W^\perp$ (W perp)
$W \subseteq V$ define \(W^{\perp} = \{u \in V: (u,w) = 0\ \forall w \in W\}\)
Proposition
$V$ a finite dimensional inner product space. $W \leq V$ \(\implies V = W \oplus W^\perp\)
Theorem 14.5
$V$ a finite dimensional inner product space
$V$ has orthonormal basis
Any orthonormal set of vectors ${w_1,\dots,w_r}$ can be extended to orthonormal basis of $V$
Gram-Schmidt Process
Start with basis ${v_1,\dots,v_n}$ of $V$
let $u_1 = \frac{v_1}{||v_1||}$ define $w_2 = v_2 - (v_2,u_1)u_1$
$\implies (w_2,u1) = 0, \quad$ let $u_{2} = \frac{w_2}{||w_2||}$
$\implies {u_1,u_2}$ orthonormalLet
With $u_3 = \frac{w_3}{||w_3||} \implies {u_1,u_2,u_3}$
- Continue, for $i^{\text{th}}$ step
$$u_i = \frac{w_i}{||w_i||}\quad w_i = v_i - (v_i,u_1)u_1 - \dots - (v_i,u_{i-1})u_{i-1}$$ Yielding after $n$ steps an orthonormal basis ${u_{1},\dots,u_{n} }$ with
$$\text{Sp}(u_1,\dots,u_i) = \text{Sp}(v_1,\dots,v_i) \quad \forall i \in \{1,\dots,n\}$$
Projections
$V$ an inner product space. $v,w \in V\backslash 0$
Projection of $v$ along $w$ defined to be $\lambda w$ for $\lambda \frac{(v,w)}{(w,w}$.
For $W \leq V, v\in V$
define projection of $V$ along $W$ as follows:
Define orthogonal projection map along $W$.
Proposition 14.7.
$V$ an inner product space. $W \leq V$ with $\pi_W$ orthogonal projection map along $W$
$v\in V \implies \pi_W$ vector in $W$ closest to $V$
i.e for $w \in W$, $||w-v||$ minimum for $w = \pi_W(v)$dist$(v,w)$ denotes shortest distance from $v$ to any vector in $W$
$\implies \text{dist}(v,w) = ||v - \pi_W(v)$${v_1,\dots,v_r}$ orthonormal basis of $W$
$\implies \pi_W(v) = \sum_{j=1}^{r}(v,v_j)v_j$\
Change of orthonormal basis
Proposition 14.8
$V$ an inner product space. $E = {e_1,\dots,e_n}$, $F = {f_1,\dots,f_n}$ orthonormal basis of $V$
$P = (p_{ij})$ change of basis matrix. \(f_i = \sum_{j=1}^{n}p_{ji}e_{j} \implies P^{T}\bar{P} = I\)
Definition
$P \in M_{n}(\mathbb{R}) : P^TP = I \implies$ orthogonal matrix
$P \in M_{n}(\mathbb{C}) : P^T\bar{P} = I \implies$ unitary matrix
Properties of the above matrices
length-preserving maps of $\mathbb{R}^{n},\mathbb{C}^{n}$ (isometries)
i.e $||Pv|| = ||v|| \quad \forall v$Set of all isometries form a group - classical group\
orthogonal group; $O(n,\mathbb{R}) = {P \in M_{n}(\mathbb{R}) : P^{T}P = I}$
Unitary Group; $U(n,\mathbb{C}) = {P \in M_{n}(\mathbb{C}) : P^{T}\bar{P} = I$
15 Linear maps on inner product spaces
Proposition 15.1.
$V$ a finite dimensional inner product space. $T: V\to V$ a linear map
$\implies \exists!$ linear map $T^*:V \to V$ s.t $\forall u,v \in V$
Say $T^*$ - adjoint of $T$
$T$ self-adjoint if $T = T^*$
Proposition 15.2.
$V$ an inner product space with orthonormal basis $E = {v_1,\dots,v_n}$
$T:V \to V$ a linear map, $A = [T]_{E}$
$\implies [T^*]_{E} = \bar{A}^T$ if field $\mathbb{R}\implies A$ symmetric, if field $\mathbb{C}\implies A$ hermitian
Theorem 15.3. Spectral Theorem
$V$ an inner product space. $T: V \to V$ a self-adjoint linear map $\implies V$ has orthonormal basis of $T$-eigenvectors.
Corollary 15.4.
$A \in M_n(\mathbb{R}) \implies \exists$ orthogonal $P$ s.t $P^{-1}AP$ diagonal
$A \in M_n(\mathbb{C}) \implies \exists$ unitary $P$ s.t $P^{-1}AP$ diagonal
Lemma 15.5.
$T: V\to V$ self-adjoint
eigenvalues of $T$ real
eigenvectors for distinct eigenvalues, orthogonal to each other
If $W \subseteq V$, $T-$invariant $\implies W^\perp$ is also $T-$invariant
16 Bilinear & Quadratic Forms
Definition. - Bi-linear form
$V$ a vector space over $F$
Bi-linear form on $V$ a map; $(,): V\times V \to F$ which is both right and left-linear.
i.e $\forall \alpha,\beta \in F$
$(\alpha v_1 + \beta v_2, w) = \alpha(v_1,w) + \beta(v_2,w)$
$(v,\alpha w_1 + \beta w_2) = \alpha(v,w_1) + \beta(v,w_2)$
General example
$F$ a field, $V = F^n$ with $A \in M_n(F)$
$\implies (u,v) = u^TAv \quad \forall u,v \in V$ a bilinear form on $V$
Matrices
$(,)$ a bilinear form on finited dimensional vector space $V$. With $B = { v_1,\dots,v_n }$
$A$ matrix of $(,)$ w.r.t $B$, So $(a_{ij}) = (v_i,v_j) \implies \forall u,v \in V\ (u,v) = [u]_{B}^{T}A[v]_B$
Definition - Symmetric & Skew-symmetric
Bilinear form $(,)$ on V is
Symmetric if $(u,v) = (v,u)\ \forall u,v \in V$
Skew symmetric if $(v,u) = -(u,v)\ \forall u,v \in V$
Definition - Characteristic of Field $F$
$char$ of field $F$ is the smallest $n \in \mathbb{N}_+$ s.t $n = 0$. if no such $n$ exists say $char(F) = 0$
Lemma 16.1.
$V$ a vector space over $F$ with $char(F) \neq 2$
$(,)$ skew-symmetric bilinear form on $V \implies (v,v) = 0\ \forall v \in V$
Orthogonality
Theorem 16.2
bilinear form $(,)$ has property that
Definition - Non-degenerate
$(,)$ on $V$ non-degenerate if $V^\perp = {0}$. Where $V^\perp$ defined analogously w.r.t bilinear forms.
$V^\perp = {0} \iff$ matrix of $(,)$ w.r.t a basis is invertible.
Dual Space
Proposition 16.3.
Suppose $(,)$ non-degenerate bilinear form on a finite dimensional vector space $V$.
$v\in V$ define $f_v \in V^{\ast}$
$f_v(u) = (v,u)\quad \forall u \in V$
$\implies \phi: V \to V^{\ast}$ mapping $v \mapsto f_v \ (v \in V)$ an isomorphism
$\forall W \leq V$ we have $dim(W^\perp) = dim(V)-dim(W)$
Bases
Definition
$A,B \in M_n(F)$ congruent if $\exists$ invertible $P \in M_n(F)$ s.t
$A,B$ congruent $\implies$ bilinear forms $\ (u,v){1} = u^{T}Av$ and $(u,v){2} = u^{T}Bv $ are equivalent
Skew-symmetric bilinear forms
Theorem 16.4.
$V$ a finite dimensional vector space over $F$ where $char(F) \neq 2$
$(,)$ non-degenerate skew-symmetric bilinear form on $V$. Then
$dim(V)$ even
$\exists$ basis $B = {e_1,f_1,\dots,e_m,f_m}$ of $V$
s.t matrix of $(,)$ w.r.t $B$ is a block-diagonal matrix$$J_m = \underbrace{\begin{pmatrix} 0 & 1\\ -1 & 0\end{pmatrix} \oplus \dots \oplus \begin{pmatrix} 0 & 1\\ -1 & 0\end{pmatrix}}_{m \text{ blocks }}$$ So that $(e_i,f_i) = -(f_i,e_i) = 1$
$(e_i,e_j) = (f_i,f_j) = (e_i,f_j)=(f_j,e_i) = 0\quad \forall i \neq j$
Corollary 16.5.
If $A$ invertible skew-symmetric $n \times n$ matrix over $F$ where $char(F) \neq 2 \implies n$ even and $A$ congruent to $J_m$
Symmetric bilinear forms
Theorem 16.6.
$V$ a finite dimensional vector space over $F$ where $char(F) \neq 2$
$(,)$ a non-degenerate symmetric bilinear form on $V$
$\implies V$ has orthogonal basis $B = {v_1,\dots,v_n}$
Matrix of $(,)$ w.r.t $B$ $=diag(\alpha_1,\dots,\alpha_n)$
Corollary 16.7.
$A$ invertible symmetric matrix over $F, char(F) \neq 2$
$\implies A$ congruent to diagonal matrix
Computing orthogonal basis for 16.6
find $v_1$ s.t $(v_1,v_1) \neq 0$
Compute $v_{1}^{\perp}$ and find $v_2 \in v_{1}^{\perp}$ s.t $(v_2,v_2) \neq 0$
Compute $Sp(v_1,v_2)^\perp$ and find $v_3 \in Sp(v_1,v_2)^\perp$ s.t $(v_3,v_3) \neq 0$
Continue until you get orthogonal basis
Quadratic Form
Assume from now $F$ s.t $char(F) \neq 2$, $V$ a finite dimensional vector space over $F$
Definition - Quadratic form
Quadratic form on $V$ a map $Q: V \to F$ of form
$(,)$ a symmetric bilinear form on $V$
$Q$ non-degenerate if $(,)$ non-degenerate.
Remarks
given $Q$ we find $(u,v) = \frac{1}{2}[Q(u+v)-Q(u)-Q(v)]$
$V = F^{n}$ every symmetric bilinear forms s.t
$$(x,y) = x^TAy \qquad \text{for } A = A^T, (x,y \in V)$$ For $\mathbf{x} = (x_1,\dots,x_n)^T$
A general homogeneous quadratic polynomial in $x_1,\dots,x_n$ ( all terms of degree 2)
Change of variables
Definition - Equivalent Quadratic Forms
$V = F^{n},\ Q: V \to F$
$Q(x) = x^TAx\ \forall x \in V, A$ symmetric
Take $y = (y_1,\dots,y_n)^T$ s.t $x = Py$ for $P$ invertible
$\implies Q(x) = y^TP^TAPy = Q’(y)$
If such a $P$ exists we say $Q,Q’$ equivalent
note:
Congruent matrices $A, P^TAP$
$A \sim P^TAP \iff P$ orthogonal\
Theorem 16.8.
$V = F^{n}$, $Q:V\to F$ non-degenerate quadratic form
- if $F = \mathbb{C}\implies Q$ equivalent to form\
Has matrix $I_{n}$
- if $F = \mathbb{R}\implies Q$ equivalent to unique $Q_{p,q}; p+q = n$
$$Q_{p,q}(x) = x_{1}^{2} + \dots + x_{p}^{2} - (x_{p+1}^{2} + \dots + x_{p+q}^{2})\quad (x \in \mathbb{C}^{n})$$ Has matrix $I_{p,q} = \begin{pmatrix} I_{p} & 0\ 0 & -I_{q}\end{pmatrix}$
- if $F = \mathbb{Q}\implies \exists$ infinitely many inequivalent non-degenerate quadratic forms on $\mathbb{Q}^{n}$
Definition - Isometry
$f = (,)$ a non-degenerate symmetric/skew-symmetric bilinear form on finite dimensional vector space $V$
Isometry of $f$ a linear map $T:V\to V$ s.t
$T$ invertible since $f$ non-degenerate.
Definition - Isometry Group
forms a subgroup of general linear group $GL(V)$
Equivalently;
fix basis $B$ of $V$, $A$ matrix of $f$ w.r.t $B$ if $[T]_{B} = X \implies T \in I(V,f) \iff X^TAX = A$
\[\implies I(v,f) \cong \{X \in GL(n,F) : X^TAX = A\}\]$f$ skew-symmetric $\implies$ there is only one form (up to equivalence) so we get one isometry group; Classical symplectic group Sp$(V,f)$
$f$ symmetric $\implies$ there are many forms, forming the isometry groups; the classical orthogonal groups $O(V,f)$
NUMERICAL ANALYSIS
Computing with Numbers
Numbers
Binary Representation
Definition 1.
$B_0,\dots,B_p \in {0,1}$ denote $x\in \mathbb{N}_{0}$ in binary format
\[(B_p\ldots B_1B_0)_2 := 2^pB_p + \cdots + 2B_1 + B_0\]For $b_1,b_2,\ldots \in {0,1}$, Denote $x\in\mathbb{R}^{+}$ in binary format by:
\[(B_p \ldots B_0.b_1b_2b_3\ldots)_2 = (B_p \ldots B_0)_2 + {b_1 \over 2} + {b_2 \over 2^2} + {b_3 \over 2^3} + \cdots\]Integers
Definition 2. Ring of integers modulo $m$
\({\mathbb Z}_{m} := \{0 \ ({\rm mod}\ m), 1 \ ({\rm mod}\ m), \ldots, m-1 \ ({\rm mod}\ m) \}\) Integers with $p-$ bits represent elements in $\mathbb{Z}_{2^p}$
Integer arithmetic equivalent to arithmetic module $2^p$
Signed Integer
Use Two’s complement convention.
\[\text{Integer is} \begin{cases} \text{negative}, & \text{if 1st bit} = 1\\ \text{positive}, & \text{if 1st bit} = 0\\ \end{cases}\]$2^p - y$ interpreted as $-y$
e.g
11001001 = -55 01001001 = 73
Overflow
Given arithmetic is modulo $2^p$ we often get overflow errors
typemax(Int8) + Int8(1)# returns typemin(Int8)
127 + 1 = -128
01111111
00000001+
--------
=10000000
Variable bit representation
Can represent integers using a variable number of bits, hence avoiding overflow.
In Julia we have BigInts created by big()
Division
We have $2$ types of division
Integer division $(\div)$
$5 \div 2$ equivalent todiv(5,2)rounds down returning2Standard Division $(/)$
Returns floating-point number
5 / 2
Can also create rationals using $(//)$
(1//2) + (3//4)
Rational arithmetic often leads to overflow so combine it with big() often.
Floating Point numbers
Subset of real numbers representable using a fixed number of bits.
Definition 3. Floating-point numbers
Given integers
- $\sigma$ - (Exponential shift)
- $Q$ - (Number of exponent bits)
- $S$ - (The precision)
Define set of floating-point numbers as
\[F_{\sigma,Q,S} := F^{normal}_{\sigma,Q,S} \cup F^{sub-normal}_{\sigma,Q,S} \cup F^{special}\]With each component as such
\[\begin{aligned} F^{normal}_{\sigma,Q,S} &= \{ \pm 2^{q-\sigma} \times (1.b_1b_2\dots b_S)_2 : 1 \leq q < 2^Q -1 \}\\ F^{sub-normal}_{\sigma,Q,S} &= \{\pm 2^{1-\sigma} \times (0.b_1b_2b_3\ldots b_S)_2\}.\\ F^{special} &= \{-\infty,\infty,\texttt{NaN}\}\end{aligned}\]Floating point numbers stored in $1+ Q +S$ total bits as such \(\textcolor{cyan}{s}\textcolor{orange}{q_{Q-1}\ldots q_0}\textcolor{magenta}{b_1 \ldots b_S}\)
With first bit the sign bit 0 positive, 1 negative
Bits $q_{Q-1}\ldots q_0$ the exponent bits - binary digits of unsigned integer $q$
Bits $b_1 \ldots b_S$ the significand bits.
For $q = (q_{Q-1}\ldots q_0)_2$
$1 \leq q < 2^Q-1$ - Bits represent normal number
\[x = \pm 2^{q-\sigma} \times (1.b_1b_2b_3\ldots b_S)_2\]$q = 0$. (All bits are $0$) - Bits represent sub-normal number. \(x = \pm 2^{1-\sigma} \times (0.b_1b_2b_3\ldots b_S)_2.\)
$q = 2^Q -1$ (All bits are $1$) - Bits represent special number. $\pm \infty$
IEEE Floating-point numbers
Definition 4. IEEE Floating-point numbers
IEEE has $3$ standard floating-point formats defined as such with corresponding types in Julia \(\begin{aligned} F_{16} &:= F_{15,5,10} & \texttt{Float16}-\text{Double-precision}\\ F_{32} &:= F_{127,8,23} & \texttt{Float32}-\text{Single-precision}\\ F_{64} &:= F_{1023,11,52} & \texttt{Float64}-\text{Half-precision}\end{aligned}\) Float64 - created by using decimals. e.g 1.0
Float32 - created by using f0 e.g 1f0
Special normal numbers
Definition 5. Machine epsilon
Denoted:
\[\epsilon_{m,S} := 2^{-S}\] \[\min |F_{\sigma,Q,S}^{\rm normal}| = 2^{1-\sigma}\]Largest (postive) normal number is \(\max F_{\sigma,Q,S}^{\rm normal} = 2^{2^Q-2-\sigma} (1.11\ldots1)_2 = 2^{2^Q-2-\sigma} (2-\epsilon_{\rm m})\)
Special Numbers
Definition 6. Not a Number
We have NaN represent "not a number"
arithmetic
arithmetic on floating-points exact up to rounding.
Definition 7. Rounding
\(\begin{aligned} \rm fl^{\rm UP}_{\sigma_Q,S}: \mathbb{R}\to \rm F_{\sigma,Q,S} & \text{ rounds up}\\ \rm fl^{dOWN}_{\sigma_Q,S}: \mathbb{R}\to F_{\sigma,Q,S} & \text{ rounds down}\\ \rm fl^{\rm Nearest}_{\sigma_Q,S}: \mathbb{R}\to F_{\sigma,Q,S} & \text{ rounds nearest}\end{aligned}\) In case of tie, returns floating-point number whose least significand bit is equal to 0
$fl^{nearest}$ the default rounding mode. Exempt excess notation when implied by context.
Rounding modes in Julia we are going to use: RoundUp, RoundDown, RoundNearest
Use setrounding(Float__, roundingmode) to change mode in a chunk of code.
Each of the above defined in IEEE arithmetic.
Warning These operations are not associative $(x \oplus y) \oplus z \neq x \oplus (y \oplus z)$
Bounding errors in floating-point arithmetic
Definition 8. Absolute/relative error
if $\tilde{x} = x + \delta_{rma} = x(1+\delta_r)$
$\lvert\delta_a\rvert$ - absolute error
$\delta_r$ - relative error
Definition 9. Normalised Range
Normalised range ${\cal N}_{\sigma,Q,S} \subset {\mathbb R}$ - subset of reals, that lies between smallest and largest normal floating-point number:
\[{\cal N}_{\sigma,Q,S} := \{x : \min |F_{\sigma,Q,S}| \leq |x| \leq \max F_{\sigma,Q,S} \}\]Proposition. - Rounding arithmetic
if $x \in \cal{N} \implies$
With relative error:
\[\begin{aligned} |\delta_x^{\rm nearest}| &\leq {\epsilon_{\rm m} \over 2} \\ |\delta_x^{\rm up/down}| &< {\epsilon_{\rm m}}.\end{aligned}\]arithmetic and Special numbers
We have the following identiites
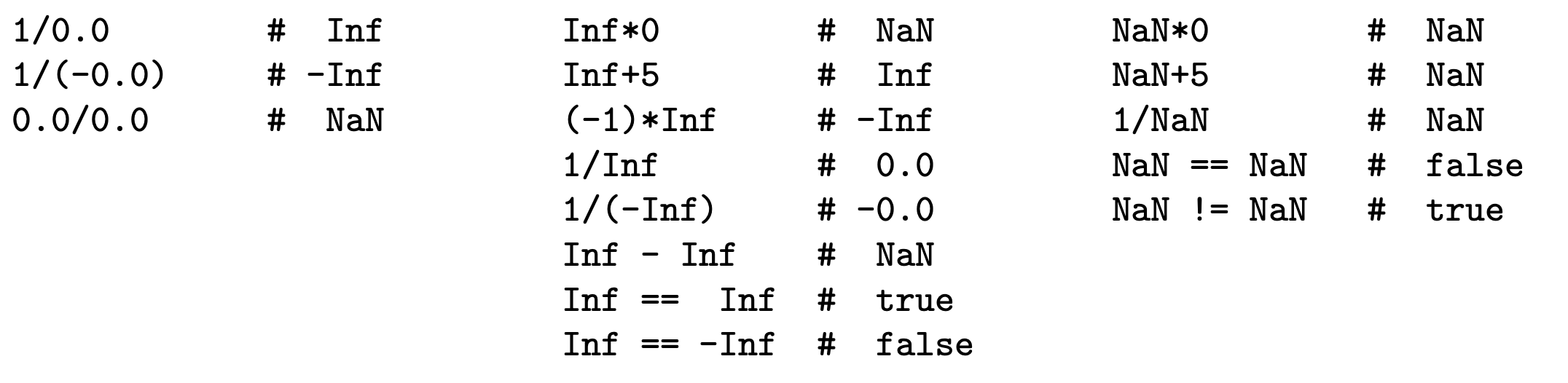
Special functions
Functions such as cos, sin, exp designed to have relative accuracy
e.g for s = sin(x) we satisfy
for reasonable small $c > 0$ given $x \in F^{\rm normal}$
High-precision floating-point numbers
Possible to set precision using BigFloat type created using big()
Use to find rigorous bound on a number.
e.g
setprecision(4_000) # 4000 bit precision
setrounding(BigFloat, RoundDown) do
big(1)/3
end, setrounding(BigFloat, RoundUp) do
big(1)/3
end
(0.3333333333333333333333333333333333333333333333333333333333333333333333333333305,
0.3333333333333333333333333333333333333333333333333333333333333333333333333333348)
Differentiation
Considering functions:
Black-box function $f^{\rm FP}: D \to F,\ D \subset F \equiv F_{\sigma,Q,S}$
Only know function pointwise, $F$ discrete $\implies f^{\rm FP}$ not differentiable rigorously.
Assume $f^{\rm RP}$ approximates a differentiable function $f$ with controlled error.Generic function
A formula that can be evaluated on arbitrary types. e.g polynomial $p(x) = p_0 + p_1 x + \dots + p_{n}x^{n}$
Consider both differentiable $f:D \to \mathbb{R},\ D \subset \mathbb{R}$ and floating point evaluated $f^{\rm FP}: D \cap F \to F$, which is actually computed.Graph Function
Function built by composition of basic "kernels" with known differentiability properties.
Finite-differences
\[f'(x) = \lim_{h \rightarrow 0} {f(x+h) - f(x) \over h} \implies f'(x) \approx {f(x+h) - f(x) \over h}\]for sufficiently small $h$
Approximation uses only black-box notion of function.
Proposition. - Bounding the derivative \(\left|f'(x) - {f(x+h) - f(x) \over h}\right| \leq {M \over 2} h\) where $M = \sup_{x \leq t \leq x+h} |f’‘(t)|$. Given by Taylor’s theorem.
Can also use left-side and central differences to compute derivatives.
$f’(x) \approx {f(x) - f(x-h) \over h}$
$f’(x) \approx {f(x + h) - f(x - h) \over 2h}$
Bounding the error
Theorem 1. (Finite differences error bound)
$f$ twice-differentiable in neighbourhood of $x$
Assume $f^{\rm FP} = f(x) + \delta_{x}^{f}$ has uniform absolute accuracy in that neighbourhood i.e $|\delta_x^f| \leq c \epsilon_{\rm m}$ for fixed constant $c$.
Take $h = 2^{-n}$ for $n \leq S$ (no. of Significand bits) and $|x|<1$
Finite difference approximation then satisfies
Where
\[|\delta_{x,h}^{\rm FD}| \leq {|f'(x)| \over 2} \epsilon_{\rm m} + M h + {4c \epsilon_{\rm m} \over h}\]for $M = \sup_{x \leq t \leq x+h} |f’‘(t)|$.
3 terms in bound tell us behaviour.
Heuristic - (finite differences with floating point step.) Choose $h$ proportional to $\sqrt{\epsilon_m}$
Dual numbers
Definition 10. Dual numbers
Dual numbers, $\mathbb{D}$ Commutative ring over reals generated by 1 and $\epsilon$ with $\epsilon^2 = 0$, written $a + b \epsilon$
Connection with differentiation
Dual numbers not prone to growth due to round-off errors.
Theorem 2. (Polynomials on dual numbers)
$p$ a polynomial
\[p(a+b\epsilon) = p(a) + bp'(a)\epsilon\]Definition 11. Dual extension
$f$ real-valued function differentiable at $a$, a dual extension at $a$ if
\[f(a + b \epsilon) = f(a) + b f'(a) \epsilon\]Lemma - (Product and Chain rule)
$f$ a dual extension at $g(a)$, $g$ a dual extension at $a$
$f,g$ dual extensions at $a$
\[\begin{aligned} \implies r(x) := f(x)g(x) & \text{ a dual extension at a}\end{aligned}\]Computing with Matrices
Structured Matrices
Consider the following structures
Dense
Considered unstructured, need to store all entries in vector or Matrix.
Reduces directly to standard algebraic operationsTriangular
A matrix upper of lower triangular, can invert immediately with back-substitution
Store as dense and ignore upper/lower entries in practice.Banded
A matrix zero, appart from entries a fixed distance from diagonal.
Have diagonal, bidiagonal and tridiagonal matrices.Permutation
Permutation matrix permutes rows of a vectorOrthogonal
$Q$ orthogonal satisfies $Q^T Q = I$, hence easily inverted
Dense vectors and matrices
Storage in memory
Matrixstored consecutively in memory
going down column-by column. (column-major format)Vectorof primitive type
stored consecutively in memory.
A = [1 2; vec(A) = 1
3 4; 3
5 6] 5
2
4
6
Transposing A done lazily, A' stores entries by row
Matrix multiplication done as expected A*x
Implemented 2 ways
Using Traditional definition
\[\begin{bmatrix} \sum_{j=1}^n a_{1,j} x_j \\ \vdots \\ \sum_{j=1}^n a_{m,j} x_j \end{bmatrix}\]Or going column-by-column
\[x_1 \mathbf{a}_1 + \cdots + x_n \mathbf{a}_n\]Both are $O(mn)$ operations, but column-by-column faster due to more efficient memory accessing.
Solving a linear system done by \
A = [1 2 3; returns # 41.000000000000036
1 2 4; -17.000000000000014
3 7 8] 1.0
b = [10; 11; 12]
A \ b
Triangular Matrices
Represented as dense square matrices, where we ignore entries above/below diagonal.
A = [1 2 3;
4 5 6;
7 8 9]
U = UpperTriangular(A)
# 1 2 3
5 6
9
L = LowerTriangular(A)
# 1
4 5
7 8 9
We have U,L both storing all the data of A
Solving upper-triangular system
by computing $x_n, x_{n-1}, \ldots, x_1$ by the back-substitution formula:
\[x_k = {b_k - \sum_{j=k+1}^n u_{kj} x_j \over u_{kk}}\]Multiplication and solving linear system $O(n^2)$ for a triangular matrix.
Forward substituion formula
For the case when we have a lower triangular system of equations.
\[x_{k} = \frac{b_k - \sum_{j=1}^{n-1} u_{kj}x_{j} }{u_{kk}}\]Banded Matrices
Definition 12. Bandwidths
Matrix $A$ has
lower-bandwidth, $l$ if $A[k,j] = 0 \forall k-j>l$
upper-bandwidth, $u$ if $A[k,j] = 0 \forall j-k>u$
strictly lower-bandwidth if it has lower-bandwidth $l$ and $\exists j$ such that $A[j+l,j] \neq 0$
strictly upper-bandwidth if it has upper-bandwidth $u$ and $\exists k$ such that $A[k,k+u] \neq 0$
Definition 13. Diagonal
Matrix diagonal if square and $l=u=0$ the bandwidths.
Stored as Vectors in Julia.
Perform multiplication and solving linear systems in $O(n)$ operations.
Definition 14. Bidiagonal
Matrix bidiagonal if square and has bandwidths
$(l,u) = (1,0)$ $\implies$ lower-bidiagonal
$(l,u) = (0,1)$ $\implies$ upper-bidiagonal
Bidiagonal([1,2,3], [4,5], :L)
# 1 ⋅ ⋅
4 2 ⋅
5 3
Bidiagonal([1,2,3], [4,5], :U)
# 1 4
2 5
3
Multiplication and solving linear systems still $O(n)$ operations.
Definition 15. Tridiagonal
Matrix tridiagonal if square and has bandwidths $l=u=1$
Tridiagonal([1,2], [3,4,5], [6,7])
# 3 6 ⋅
1 4 7
2 5
Permutation Matrices
Matrix representation of the symmetric group $S_n$ acting on $\mathbb{R}^n$
$\forall \sigma \in S_n$ a bijection between ${1,2,\dots,n}$ and itself.
Cauchy Notation
Where ${\sigma_1,\ldots,\sigma_n} = {1,2,\ldots,n}$
Inverse permutation given by $\sigma^{-1}$, found by swapping rows of cauchy notation and reordering.
Permuting a vector
$\mathbf{\sigma} = [\sigma_1,\dots,\sigma_n]^T$
Obviously $\mathbf{v[\sigma][\sigma^{-1}] = v}$
Definition 16. Permutation Matrix
Entries of $P_{\sigma}$ given by
\[P_{\sigma}[k,j] = e^{T}_{k} P_\sigma e_{j} = e_{k}^{T} e_{\sigma^{-1}_j} = \delta_{k,\sigma^{-1}_j} = \delta_{\sigma_k,j}\]where $\delta_{k,j}$ is the Kronecker delta
Permutation matrix equal to identity matrix with rows permuted.
Proposition - Inverse of Permutation Matrix
\[P^{T}_{\sigma} = P_{\sigma^{-1}} = P_{\sigma}^{-1} \implies P_{\sigma} \text{ orthogonal }\]Orthogonal Matrices
Definition 17. Orthogonal Matrix
Square matrix orthogonal if $Q^T Q = Q Q^T = I$
Special cases
Simple Roations
Definition 18. Simple Rotation
$2\times2$ rotation matrix through angle $\theta$
\[Q_{\theta} := \begin{bmatrix} \cos \theta & -\sin \theta \cr \sin \theta & \cos \theta \end{bmatrix}\]Definition 19. two-arg arctan
two-argument arctan function gives angle $\theta$ through point $[a,b]^T$ \({\rm atan}(b,a) := \begin{cases} {\rm atan}{b \over a} & a > 0 \\ {\rm atan}{b \over a} + \pi & a < 0\hbox{ and }b >0 \\ {\rm atan}{b \over a} + \pi & a < 0\hbox{ and }b < 0 \\ \pi/2 & a = 0\hbox{ and }b >0 \\ -\pi/2 & a = 0\hbox{ and }b < 0 \end{cases}\) atan(-1,-2) # angle through [-2,-1]
Proposition - Rotating vector to unit axis
\[Q = {1 \over \sqrt{a^2 + b^2}}\begin{bmatrix} a & b \cr -b & a \end{bmatrix}\]Satisfies $Q \begin{bmatrix} a \ b \end{bmatrix} = \sqrt{a^2 + b^2} \begin{bmatrix} 1 \ 0 \end{bmatrix}$
Reflections
Definition 20. Reflection Matrix
Given vector $\mathbf{v}$ satisfying $||v|| = 1$, reflection matrix is orthogonal matrix.
\[Q_\mathbf{v} := I - 2 \mathbf{v}\mathbf{v}^T\]Reflections in direction of $\mathbf{v}$
Proposition - Properties of reflection matrix
1. Symmetry: $Q_v = Q_{v}^{T}$
2. Orthogonality: $Q_{v}^{⊤} Q_{v} = I$
2. ${v}$ is an eigenvector of $Q_{v}$ with eigenvalue $-1$
4. $Q_{v}$ is a rank -1 perturbation of $I$
3. $\det Q_{v} = -1$
Definition 21. Householder reflection
Given vector $\mathbf{x}$ define Householder reflection.
\[Q_{\mathbf{x}}^{\pm,H} := Q_{\mathbf{w}}\]For $\mathbf{y} = \mp ||\mathbf{x}|| e_1 + x$, $\mathbf{w = \frac{y}{||y||}}$
Default choice in sign is
Lemma
\[Q_{x}^{\pm,H}\mathbf{x} = \pm ||\mathbf{x}||e_1\]Decompositions and Least Squares
Consider decompositions of matrix into products of structured matrices.
$QR$ Decomposition (For square or rectangular matrix $A\in \mathbb{R}^{m\times n},\ m \geq n$)
\[A = QR = \underbrace{\begin{bmatrix} \mathbf{q}_1 | \cdots | \mathbf{q}_m \end{bmatrix}}_{m \times m} \underbrace{\begin{bmatrix} \times & \cdots & \times \\ & \ddots & \vdots \\ && \times \\ &&0 \\ &&\vdots \\ && 0 \end{bmatrix}}_{m \times n}\]$Q$ orthogonal and $R$ right/upper-triangular
Reduced $QR$ Decomposition
\[A = \hat{Q}\hat{R} = \underbrace{\begin{bmatrix} \mathbf{q}_1 | \cdots | \mathbf{q}_m \end{bmatrix}}_{m \times m}\begin{bmatrix} \times & \cdots & \times\\ & \ddots & \vdots\\ & & \times \end{bmatrix}\]$Q$ has orthogonal columns, and $\hat{R}$ upper-triangular.
PLU Decomposition (For square Matrix) \(A = P^T LU\)
$P$ a permutation matrix, $L$ lower triangular and $U$ upper triangular
Cholesky Decomposition (For square, symmetric positive definite matrix ($x^T Ax > 0 \forall x \in \mathbb{R}^n, x \neq 0$))
\[A = LL^T\]
Useful as component pieces easily inverted on a computer.
\[\begin{aligned} A = P^{T}LU &\implies\ A^{-1}\mathbf{b} = U^{-1} L^{-1} P \mathbf{b}\\ A = QR &\implies\ A^{-1}\mathbf{b} = R^{-1} Q^\top \mathbf{b} \\ A = L L^⊤ &\implies\ A^{-1}\mathbf{b} = L^{-⊤} L^{-1} \mathbf{b}\end{aligned}\]QR and least squares
Consider matrices with more rows than columns.
QR decomposition contains reduced QR decomposition within it
Least squares problem
Find $\vec{x} \in \mathbb{R}^n$ s.t $||A\vec{x} - \vec{b}||$ is minimised
For $m=n$ and $A$ invertible we simply have $\vec{x} = A^{-1}\vec{b}$.
To minimise this norm, suffices to minimise
\[\| \hat{R}\mathbf{x} - \hat{Q}^{\top}\mathbf{b}\| \implies \mathbf{x} = \hat{R}^{-1}\hat{Q}^{\top}\mathbf{b}\]Provided column rank of $A$ is full, we have $\hat{R}$ invertible
Reduced QR and Gram-Schmidt
Computing QR decomposition
Write $A = \begin{bmatrix} \mathbf{a}_1 | \dots | \mathbf{a}_n \end{bmatrix}$, $a_k \in \mathbb{R}^m$
Assume $A$ has full column rank, $a_k$ all linearly independent.
Column span of first $j$ columns in $A$ same as first $j$ columns in $\hat{Q}$ \(span(\mathbf{a}_1,\dots,\mathbf{a}_n) = span(\mathbf{q}_1,\dots,\mathbf{q}_n)\)if $\mathbf{v} \in span(\mathbf{a}_1,\dots,\mathbf{a}_n) \implies \forall \mathbf{c} \in \mathbb{R}^j$
\[\begin{aligned} \mathbf{v} &= \begin{bmatrix} \mathbf{a}_1 | \dots | \mathbf{a}_j \end{bmatrix} \mathbf{c}\\ &= \begin{bmatrix} \mathbf{q}_1 | \dots | \mathbf{q}_j\end{bmatrix}\hat{R}[1:j,1:j]\mathbf{c}\\ &\in span(\mathbf{q}_1,\dots,\mathbf{q}_n) \end{aligned}\]if $\mathbf{w} \in span(\mathbf{q}_1,\dots,\mathbf{q}_n)$, we have for $\mathbf{d} \in \mathbb{R}^j$
\[\begin{aligned} \mathbf{w} &= \begin{bmatrix} \mathbf{q}_1 | \dots | \mathbf{q}_j \end{bmatrix}\mathbf{d}\\ &= \begin{bmatrix} \mathbf{a}_1 | \dots | \mathbf{a}_j\end{bmatrix}\hat{R}[1:j,1:j]^{-1}\mathbf{d}\\ &\in span(\mathbf{a}_1,\dots,\mathbf{a}_j) \end{aligned}\]
We can find an orthogonal basis using Gram-Schmidt.
By assumption of full rank of $A$
\[span(\mathbf{a}_1,\dots,\mathbf{a}_n) = span(\mathbf{q}_1,\dots,\mathbf{q}_n)\]$\mathbf{q}_1,\dots,\mathbf{q}_n$ orthogonal
\[\mathbf{q}^{T}_{k}\mathbf{q}_{l} = \delta_{kl}\]For $k,l < j$. Define
\[\mathbf{v}_j := \mathbf{a}_{j} - \sum_{k=1}^{j-1} \underbrace{\mathbf{q}^{T}_{k}\mathbf{a}_{j}}_{\mathbf{r}_{kj}}\mathbf{q}_k\]For $k < j$
\[\mathbf{q}_k^\top \mathbf{v}_j = \mathbf{q}_k^\top \mathbf{a}_j - \sum_{k=1}^{j-1} \underbrace{\mathbf{q}_k^\top \mathbf{a}_j}_{\mathbf{r}_{kj}} \mathbf{q}_k^\top \mathbf{q}_k = 0.\]Define further
\[\mathbf{q}_j = \frac{\mathbf{v}_j}{\|\mathbf{v}_j\|}\]Define $\mathbf{r}_{jj} := |\mathbf{v}_j|$, rearrange definition to have
\[\mathbf{a}_{j} = \begin{bmatrix} \mathbf{q}_{1} | \dots | \mathbf{q}_{j} \end{bmatrix} \begin{bmatrix} r_{1j} \\ \vdots \\ r_{jj} \end{bmatrix}\] \[\begin{bmatrix} \mathbf{a}_1|\cdots|\mathbf{a}_j \end{bmatrix} \begin{bmatrix} r_{11} & \cdots & r_{1j} \\ & \ddots & \vdots \\ && r_{jj} \end{bmatrix}\]Compute reduced QR decomposition column-by-column $\implies$ apply for $j=n$ to complete decomposition.
Complexity and Stability
We have a total complexity of $O(mn^{2})$ operations,
Gram-Schmidt algorithm is unstable, rounding errors in floating point accumulate, $\implies$ lose orthogonality.
Householder reflections and QR
Consider multiplication by Householder reflection corresponding to first column.
\[Q_1 := Q_{a_1}^{H}\] \[Q_1 A = \begin{bmatrix} \times & \times & \cdots & \times \\ & \times & \cdots & \times \\ & \vdots & \ddots & \vdots \\ & \times & \cdots & \times \end{bmatrix} = \begin{bmatrix} r_{11} & r_{12} & \cdots & r_{1n} \\ & \mathbf{a}_2^1 & \cdots & \mathbf{a}_n^1 \end{bmatrix} \qquad r_{1j} := (Q_1 \mathbf{a}_j)[1] \quad \mathbf{a}_1^j := (Q_1 \mathbf{a}_j)[2:m]\]Note that $r_{11} = -sign(a_1^1)|a_1|$ with all entries of $\mathbf{a}^{1}_{1}$ zero.
Now consider,
to achieve the following
\[Q_2 Q_1A = \begin{bmatrix} \times & \times & \times & \cdots & \times \\ & \times & \times & \cdots & \times \\ && \vdots & \ddots & \vdots \\ && \times & \cdots & \times \end{bmatrix} = \begin{bmatrix} r_{11} & r_{12} & r_{13} & \cdots & r_{1n} \\ & r_{22} & r_{23} & \cdots & r_{2n} \\ && \mathbf{a}_3^2 & \cdots & \mathbf{a}_n^2 \end{bmatrix} \qquad r_{2j} := (Q_2 \mathbf{a}^{1}_j)[1] \quad \mathbf{a}^2_j := (Q_2 \mathbf{a}^{1}_j)[2:m-1]\]Inductively, we get
Defining $\mathbf{a}^{0}_{j} := \mathbf{a}_j$ we have
Then
\[Q_n \cdots Q_1 A = \underbrace{\begin{bmatrix} r_{11} & \cdots & r_{1n} \\ & \ddots & \vdots\\ && r_{nn} \\&& 0 \\ && \vdots \\ && 0 \end{bmatrix}}_R\] \[\implies A = \underbrace{Q_1 \cdots Q_n}_Q R.\]PLU Decomposition
Special "one-column" Lower triangular matrices
Consider the following set of lower triangular matrices
\[{\cal L}_j := \left\{I + \begin{bmatrix} \mathbf{0}_j \\ \mathbf{l}_j \end{bmatrix} \mathbf{l}_j^⊤ : \mathbf{l}_j ∈ ℝ^{n-j} \right\}\] \[L_j = \begin{bmatrix} 1 \\ & {\ddots} \\ && 1 \\ && \ell_{j+1,j} & 1 \\ && \vdots && \dots \\ && \ell_{n,j} & & & 1 \end{bmatrix}\]With the following properties:
- \[L_{j}^{-1} = I - \begin{bmatrix} \mathbf{0}_j\\ \mathbf{l}_j \end{bmatrix}\mathbf{e}_{j}^{T} = \begin{bmatrix} 1 \\ & {\ddots} \\ && 1 \\ && -\ell_{j+1,j} & 1 \\ && \vdots && \dots \\ && -\ell_{n,j} & & & 1 \end{bmatrix} \in {\cal L}_j\]
- \[L_j L_k = I + \begin{bmatrix} \mathbf{0}_j \\ \mathbf{l}_j\end{bmatrix}\mathbf{e}_{j}^{T} + \begin{bmatrix} \mathbf{0}_k \\ \mathbf{l}_k\end{bmatrix}\mathbf{e}_{k}^{T}\]
$\sigma$ a permutation leaving first $j$ rows fixed ($\sigma_{\ell} = \ell\ \forall\ \ell \leq j)$ and $L_j \in \cal{L}_j$
\[P_{\sigma}L_j = \tilde{L}_{j}P_{\sigma} \quad \tilde{L}_{j} \in \cal{L}_{j}\]
LU Decomposition
Similarly to QR decomposition we perform a triangularisation using $L_j \in \cal{L}_j$.
Taking the following definitions
PLU Decomposition
Achieved by always pivoting when performing Gaussian elimination, swap largest in magnitude entry on the diagonal.
This gives us
for $P_{j}$ the permutation that leaves rows 1 $\to$ $j-1$ fixed, swapping row $j$ with row $k \geq j$ whose entry is maximal in magnitude.
\[L_{n-1}P_{n-1}\dots P_{2}L_{1}P_{1} = \underbrace{L_{n-1} \tilde{L}_{n-2}\dots \tilde{L}_{1}}_{L^{-1}} \underbrace{P_{n-1}\dots P_2 P_1}_{P}\]Tilde denotes combined actions of swapping permutations and lower-triangular matrices.
\[P_{n-1}\cdots P_{j+1} L_j = \tilde L_j P_{n-1}\cdots P_{j+1} \implies \tilde{L}_{j} = I + \begin{bmatrix} \mathbf{0}_j \\ \tilde \ell_{j+1,j} \\ \vdots \\ \tilde \ell_{n,j} \end{bmatrix} \mathbf{e}_j^\top \implies L =\begin{bmatrix} 1 \\ -\tilde \ell_{21} & 1 \\ -\tilde \ell_{31} & -\tilde \ell_{32} & 1 \\ \vdots & \vdots & \ddots & \ddots \\ -\tilde \ell_{n-1,1} & -\tilde \ell_{n-1,2} & \cdots & - \tilde \ell_{n-1,n-2} & 1 \\ -\tilde \ell_{n1} & -\tilde \ell_{n2} & \cdots & - \tilde \ell_{n,n-2} & -\ell_{n,n-1} & 1 \end{bmatrix}\]Cholesky Decomposition
Form of Gaussian elimination (without pivoting) for symmetric positive definite matrices
Substantially faster.
Definition 22. Positive definite
A square matrix $A \in \mathbb{R}^{n\times n}$ positive definite if $\forall x \in \mathbb{R}^n, x \neq 0$ we have
\[x^T A x > 0\]Proposition
$A \in \mathbb{R}^{n\times n}$ positive deifinite and $V \in \mathbb{R}^{n\times n}$ non-singular
Proposition
$A \in \mathbb{R}^{n\times n}$ positive definite $\implies$ diagonal entries $a_{ii} > 0$
Theorem 3. (Subslice positive definite)
$A \in \mathbb{R}^{n\times n}$ positive definite and $k \in {1,\dots,n}^{m}$ a vector of $m$ integers, each integer appearing only once
\[\implies A[k,k] \in \mathbb{R}^{m\times m} \text{ pos. definite}\]Theorem 4. (Cholesky and symmetric positive definite)
Matrix $A$ symmetric positive definite $\iff$ has Cholesky Decomposition
\[A = LL^T\]Where diagonals of $L$ positive.
Computing the Cholesky Decomposition
Using the following definitions:
$A_1 := A$
$\alpha_k := A_k[1,1]$
$\mathbf{v}_k := A_k[2:n-k+1,1]$
$A_{k+1} := A_k[2:n-k+1,2:n-k+1] - \frac{\mathbf{v}_k \mathbf{v}_k^{\top}}{\alpha_k}$
Timings
Different decompositions have trade-offs between stability and speed.
n = 100
A = Symmetric(rand(n,n)) + 100I
@btime cholesky(A);
@btime lu(A);
@btime qr(A);
# returns
82.313 μs
127.977 μs
255.111 μs
Stability
| Stable | Unstable |
|---|---|
| QR with Householder reflections | LU usually, unless diagonally dominant matrix |
| Cholesky for pos. def. | PLU rarely unstable |
Set of Matrices for which PLU unstable extremely small, often one doesn’t run into them.
Singular Values and Conditioning
Vector Norms
Definition 23. Vector-norm
Norm on $|\cdot|$ on $\mathbb{R}^n$ a function satisfying the following, $\forall x,y\in \mathbb{R}^n,\ c\in \mathbb{R}$:
Triangle inequality: $\lvert x+y\rvert \leq \lvert x\rvert + \lvert y\rvert$
Homogeneity: $\lvert\lvert cx\rvert\rvert = \lvert c\rvert\lvert\lvert x\rvert\rvert $
Positive-definiteness: $\lvert\lvert x\rvert\rvert = 0 \iff x = 0$
Definition 24. p-norm
For $1 \leq p < \infty,\ x \in \mathbb{R}^n$
\[\|x\|_{p} := (\sum_{k=1}^{n} |x_k|^p)^{1/p}\]$x_k$ $k$-th entry of $x$.
$p = \infty$ we define
Matrix Norms
Definition 25. Fröbenius norm
$A$ a $m\times n$ matrix
\[\|A\|_F := \sqrt{\sum_{k=1}^{m}\sum_{j=1]^{n}} A^{2}_{kj}}\]Given by norm(A) in Julia.
norm(A) == norm(vec(A))
Definition 26. (Matrix-norm)
$A \in \mathbb{R}^{n\times m}$ for 2 norms $\lvert\lvert \cdot\rvert\rvert_{X}$ on $\mathbb{R}^n$ and $\lvert\lvert \cdot\rvert\rvert_{Y}$ on $\mathbb{R}^{n}$
We have the induced matrix norm
Given by opnorm(A,1),opnorm(A,Inf) in Julia
Singular Value Decomposition
Definition 27. Singular Value Decomposition
For $A \in \mathbb{R}^{n\times n}$ with $rank, r>0$
Reduced singular value decomposition (SVD) is
$U \in \mathbb{R}^{m\times r}, V \in \mathbb{R}^{r\times n}$ that have orthonormal columns
$\Sigma \in \mathbb{R}^{r\times r}$ diagonal of singular values, all positive and decreasing $\sigma_1 \leq \dots \leq \sigma_{r} > 0$
Full singular value decomposition (SVD) is
$\tilde{U} \in \mathbb{R}^{m\times m}, V \in \mathbb{R}^{n\times n}$ orthogonal matrices,
$\tilde{\Sigma} \in \mathbb{R}^{m\times n}$ has only diagonal entries.
For $\sigma_{k} = 0$ if $k>r$
| if $m>n$ | if $m <n$ |
|---|---|
| \(\tilde{\Sigma} = \begin{bmatrix} \sigma_1 \\ & \ddots \\ && \sigma_n \\ && 0 \\ && \vdots \\ && 0 \end{bmatrix}\) | \(\tilde{\Sigma} = \begin{bmatrix} \sigma_1 \\ & \ddots \\ && \sigma_m & 0 & \dots & 0 \end{bmatrix}\) |
Proposition - Gram matrix kernel
Gram-matrix: $A^T A$
Kernel of $A$ also kernel of $A^T A$
Proposition - Gram matrix diagonalisation
Gram-matrix satisfies
$Q$ orthogonal and eigenvalues $\lambda_k$ non-negative
Theorem 5. (SVD existence)
$\forall A \in \mathbb{R}^{m\times n}$ has a SVD.
Corollary
$A \in \mathbb{R}^{n\times n}$ invertible
Theorem 6. (Best low rank approximation)
\[A_k := \begin{bmatrix} \mathbf{u}_1 | \dots | \mathbf{u}_k \end{bmatrix} \begin{bmatrix} \sigma_1 \\ & \ddots\\ && \sigma_k \end{bmatrix} \begin{bmatrix} \mathbf{v}_1 | ⋯ | \mathbf{v}_k \end{bmatrix}^{T}\]The best 2-norm approximation of $A$ by a rank $k$ matrix.
We have $\forall$ matrices $B$ of rank $k$, $|A-A_k|{2} \leq |A-B|{2}$
Condition numbers
Proposition
$|\epsilon_i| \leq \epsilon$ and $n\epsilon < 1$, then
for constant $\theta_n$ s.t $|\theta_n| \leq \frac{n\epsilon}{1-n\epsilon}$
Lemma. - Dot product backward error
$\mathbf{x,y} \in \mathbb{R}^n$
Where we have $|\delta\mathbf{x}| \leq \frac{n\epsilon_m}{2-n\epsilon_m}|\mathbf{x}|$, $|\mathbf{x}|$ absolute value of each entry.
Theorem 7. (Matrix-vector backward error)
$A\in \mathbb{R}^{m\times n}, \mathbf{x} \in \mathbb{R}^n$
\(mul(A,\mathbf{x}) = (A + \delta A)\mathbf{x}\) Where
$\lvert\delta A\rvert \leq \frac{n\epsilon_m}{2- n\epsilon_m}\lvert\lvert A\rvert\rvert$ $\implies$
\[\begin{aligned} \lvert\lvert \delta A\rvert\rvert_1 &\leq \frac{n\epsilon_m}{2- n\epsilon_m)}\lvert\lvert A\rvert\rvert_1\\ \lvert\lvert \delta A\rvert\rvert_{2} &\leq \frac{\sqrt{\min(m,n)}n\epsilon_m}{2-n\epsilon_m}\lvert\lvert A\rvert\rvert_2\\ \lvert\lvert \delta A\rvert\rvert_\infty &\leq \frac{n\epsilon_m}{2- n\epsilon_m)}\lvert\lvert A\rvert\rvert_\infty\\\end{aligned}\]Definition 28. Condition number
$A$ a square matrix.
Condition number (in $p$-norm)
Under the 2-norm:
\[\kappa_2(A) = \frac{\sigma_1}{\sigma_n}\]Theorem 8. (relative-error for matrix-vector)
Worst-case relative error in $A\mathbf{x} \approx (A + \delta A)\mathbf{x}$
\[\frac{\| \delta A \mathbf{x}\|}{\|A \mathbf{x}\|} \leq \kappa(A)\epsilon\]if we have relative perturbation error $|\delta A | = |A|\epsilon$
We know for floating point arithmetic the error is bounded by
Differential equations via Finite differences
Indefinite integration
For simple differential equation on interval $[a,b]$
\[\begin{aligned} u(a) &= c\\ u'(x) &= f(x) \end{aligned}\]We have, for $u_k \approx u(x_k), k \neq 1,\dots,n-1$
\[f(x_k) = u'(x_k) \approx \frac{u_{k+1} - u_{k}}{h} = f(x_k)\]As a linear system
\[\underbrace{\frac{1}{h}\begin{bmatrix} -1 & 1\\ & \ddots & \ddots\\ && -1 & 1\\ \end{bmatrix}}_{D_h \in \mathbb{R}^{n-1 \times n}} \mathbf{u}^f = \underbrace{\begin{bmatrix} f(x_1)\\ \vdots\\ f(x_{n-1}) \end{bmatrix}}_{\mathbf{f}^f}\]Super-script $^{f}$ denotes forward differences.
$D_h$ not square $\implies$ need to add extra row from the initial condition $\mathbf{e}^T\mathbf{u}^f = c$
\[\begin{bmatrix} \mathbf{e}_{1}^{T}\\ D_h \end{bmatrix}\mathbf{u}^{f} = \underbrace{\begin{bmatrix} 1\\ -1/h & 1/h\\ && \ddots & \ddots\\ && -1/h & 1/h\\ \end{bmatrix}}_{L_h} \mathbf{u}^{f} = \begin{bmatrix} c\\ \mathbf{f}^f \end{bmatrix}\]Lower-triangular bidiagonal system $\implies$ solved using forward substitution in $O(n)$
Can choose either central or backwards-difference formulae too.
Central differences
Take $m_k = \frac{x_{k+1}- x_k}{2} \implies u’(m_k) \approx \frac{u_{k+1} - u_k}{h} = f(m_k)$
Convergence
We see experimentally that the error for solutions from forward differences is $O(n^{-1})$ while for central differences it is a faster $O(n^{-2})$ convergence.
Both appearing to be stable.
Forward Euler
Consider scalar linear time-evolution for $0\leq t\leq T$
\[\begin{aligned} u(0) &= c\\ u'(t) - a(t)u(t) &= f(t)\end{aligned}\]Label $n$-point gird as $t_k = (k-1)h,\ h = \frac{T}{n-1}$
Definition 29. Restriction Matrices
Define $n-1 \times n$ restriction matrices as
\[\begin{aligned} I_n^{\rm f} &:= \begin{bmatrix} 1 \\ &\ddots \\ &&1 & 0 \end{bmatrix}\\ I_n^{\rm b} &:= \begin{bmatrix} 0 & 1 \\ &&\ddots \\ &&& 1 \end{bmatrix} \\ \end{aligned}\]Can replace discretisation using finite differences. $\frac{u_{k+1}-u_{k}}{h} - a(t_k)u_k = f(u_k)$
Giving us the linear system
Where we have
\[A_n = \begin{bmatrix} a(t_1) \\ &\ddots \\ && a(t_n) \end{bmatrix}\quad \mathbf{f} = \begin{bmatrix} f(t_1) \\ \vdots \\ f(t_n) \end{bmatrix}\]Backward Euler
Simply replace forward-difference with backward-difference $\frac{u_{k}-u_{k-1}}{h} - a(t_k)u_k = f(u_k)$
Giving us our system:
Still bidiagonal forward-substitution
\[\begin{aligned} u_1 &= c\\ (1 - ha(t_{k+1}))u_{k+1} &= u_k + hf(t_{k+1})\\ u_{k+1} &= (1-ha(t_{k+1}))^{-1} (u_{k} + hf(t_{k+1})\end{aligned}\]Systems of equations
Solving systems of the form
\[\begin{aligned} \mathbf{u}(0) &= c\\ \mathbf{u}'(t) - A(t)\mathbf{u}(t) &= f(t)\end{aligned}\]For $\mathbf{u,f}: [0,T] \to \mathbb{R}^{d}$ and $A: [0,T] \to \mathbb{R}^{d\times d}$
Once again discretise at the grid $t_k$ approximating $\mathbf{u}(t_k) \approx \mathbf{u}_k \in \mathbb{R}^d$
Forward-Euler \(\begin{aligned} \mathbf{u}_1 & = c\\ \mathbf{u}_{k+1} &= (I-hA(t_{k+1}))^{-1}(\mathbf{u}_k + h\mathbf{f}(t_{k+1}))\end{aligned}\)
Nonlinear problems
Forward-euler extends naturally to nonlinear equations.
\[\mathbf{u}' = f(t,\mathbf{u}(t))\]Becomes:
\[\mathbf{u}_{k+1} = \mathbf{u}_k + hf(t_k, \mathbf{u}_k)\]Two-point boundary value problem
Consider one discretisation, since symmetric
\[u''(x) \approx \frac{u_{k-1} - 2u_k + u_{k+1}}{h^2}\]So we use the $n -1 \times n + 1$ matrix
\[D^{2}h := \frac{1}{h^2} \begin{bmatrix} 1 & -2 & 1\\ & \ddots & \ddots & \ddots\\ && 1 & -2 & 1 \end{bmatrix}\]Convergence
Definition 30. (Toeplitz)
Toeplitz matrix has constant diagonals
\[T[k,j] = a_{k-j}\]Proposition. - (Bidiagonal Toeplitz inverse)
Inverse of $n\times n$ bidiagonal Toeplitz matrix is
\[\begin{bmatrix} 1\\ -\ell & 1\\ & -\ell & 1\\ && \ddots & \ddots\\ &&&& -\ell & 1\\ \end{bmatrix}^{-1} = \begin{bmatrix} 1\\ \ell & 1\\ \ell^{2} & \ell & 1\\ \vdots & \ddots & \ddots & \ddots\\ \ell^{n-1} & \cdots & \ell^{2} & \ell & 1 \end{bmatrix}\]Theorem 9. (Forward/Backward Euler Convergence)
Consider equation
\[u(0) = c, \quad u'(t) + au(t) = f(t)\]Denote
\[\mathbf{u} := \begin{bmatrix} u(t_1)\\ \vdots\\ u(t_n) \end{bmatrix}\]Assume $u$ twice differentiable with uniformly bounded 2nd derivative.
$\implies$ error for forwardEuler is
Poisson
For $2D$ problems consider Poisson. First stage is to row-reduce to get a symmetric tridiagonal pos. def. matrix
\[\begin{bmatrix} 1 \\ -1/h^2 & 1 \\ && 1 \\ &&& \ddots\\ &&&& 1 & -1/h^2 \\ &&&&& 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1/h^2 & -2/h^2 & 1/h^2 \\ & \ddots& \ddots& \ddots \\ && 1/h^2 & -2/h^2 & 1/h^2 \\ &&&& 1 \end{bmatrix} = \begin{bmatrix} 1 \\ 0 & -2/h^2 & 1/h^2 \\ & \ddots& \ddots& \ddots\\ && 1/h^2 & -2/h^2 & 0 \\ &&&& 1 \end{bmatrix}\]Consider right-hand side, aside from first and last row, we have
\[{1 \over h^2} \underbrace{\begin{bmatrix} -2 & 1 \\ 1 & -2 & \ddots\\ & \ddots& \ddots& 1 \\ && 1 & -2 \end{bmatrix}}_{\Delta} \begin{bmatrix} u_2 \\ \vdots \\ u_{n-1} \end{bmatrix} = \underbrace{\begin{bmatrix} f(x_2) - c_0/h^2 \\ f(x_3) \\ \vdots \\ f(x_{n-2}) \\ f(x_{n-1}) - c_1/h^2 \end{bmatrix}}_{\mathbf{f}^{p}}\]Theorem 10. (Poisson Convergence)
Suppose $u$ four-times differentiable with uniformly bounded fourth-derivative
$\implies$ finite difference approximation to Poisson convergence like $O(n^2)$
Computing with Functions
Fourier Series
Definition 31. (Complex Fourier Series)
\[f(\theta) = \sum_{n = -\infty}^{\infty}\hat{f}_k e^{ik\theta}\] \[\hat{f}_k := \frac{1}{2\pi}\int_{0}^{2\pi}f(\theta)e^{-ik\theta} d\theta\]Written as
\[f(\theta) = \underbrace{[\dots | { e}^{-2i\theta} |{ e}^{-i\theta} | \underline 1 | e^{i\theta} | { e}^{2i\theta} | \dots]}_{F(\theta)}\underbrace{\begin{bmatrix} \vdots \\ \hat{f}_{-2} \\ \hat{f}_{-1} \\ \underline{\hat{f}_0} \\ \hat{f}_1 \\ \hat{f}_2 \\ \vdots \end{bmatrix}}_{\mathbf{\hat{f}}}\]Build approximation using $n$ approximate coefficients $\hat{f}^{n}_{k} \approx \hat{f}_k$
Seperating into 3 cases:
Odd: $n = 2m+1$ we approximate
\[\begin{aligned} f(\theta) &\approx \sum_{k = -m}^{m} \hat{f}ₖ^n { e}^{ k \theta} \\ &= \underbrace{[ { e}^{-im\theta} | \dots | { e}^{-2i\theta} |{ e}^{-i\theta} | 1 | { e}^{i\theta} | { e}^{2i\theta} | \dots | { e}^{i m \theta}]}_{F_{-m:m}(\theta)} \begin{bmatrix} \hat{f}_{-m}^n \\ \vdots \\ \hat{f}_m^n \end{bmatrix} \end{aligned}\]Even: $n = 2m$ we approximate
\[\begin{aligned} f(\theta) &\approx \sum_{k = -m}^{m-1} \hat{f}ₖ^n { e}^{i k \theta} \\ &= \underbrace{[ { e}^{-im\theta} | \dots | { e}^{-2i\theta} |{ e}^{-i\theta} | 1 | { e}^{i\theta} | { e}^{2i\theta} | \dots | { e}^{i (m-1) \theta}]}_{F_{-m:m-1}(\theta)} \begin{bmatrix} \hat{f}_{-m}^n \\ \vdots \\ \hat{f}_{m-1}^n \end{bmatrix} \end{aligned}\]Taylor: if we know negative coefficients vanish $(0 = \hat{f}{-1} = \hat{f}{-2} = \dots$ we approximate:
\[\begin{aligned} f(\theta) &\approx \sum_{k = 0}^{n-1} \hat{f}ₖ^n { e}^{i k \theta} \\ &= \underbrace{[ 1 | { e}^{i\theta} | { e}^{2i\theta} | \dots | { e}^{i (n-1) \theta}]}_{F_{0:n-1}(\theta)} \begin{bmatrix} \hat{f}_0^n \\ \vdots \\ \hat{f}_{n-1}^n \end{bmatrix} \end{aligned}\]Can be thought of as approximate Taylor expansion using change of var $z = e^{i\theta}$
Basics of Fourier series
Focus on case where $\hat{f}_k$ absolutely convergent (1-norm of $\mathbf{f}$ bounded) \(\|\mathbf{\hat{f}}\|_1 = \sum_{k=-\infty}^\infty \lvert \hat{f}_k \rvert < \infty\)
Theorem 15. (Convergence)
if Fourier coefficients absolutely convergent \(\implies f(\theta) = \sum_{k = -\infty}^\infty\hat{f}_{k} { e}^{i k \theta},\quad \text{Converges Uniformly}\)
Remark
Also have convergence for continuous version of 2-norm
for any function s.t $|f|_{2} < \infty$
Proposition - (Differentiability and absolutely convergence)
if $f:\mathbb{R}\to\mathbb{C}$ and $f’$ periodic, with $f’$ uniformly bounded
$\implies$ fourier coefficients satisfy:
Remark
More times differentiabel a function $\implies$ faster the coeff. decay $\implies$ faster Fourier series converges.
If function smooth,$2\pi$ periodic $\implies$ fourier coeffs. decay faster than algebraically; decay like $O(k^{-2})\ \forall \lambda$
Remark
Let $z = e^{i\theta}$ then if $f(z)$ analytic in a neighbourhood of unit circle $\implies$ fourier coeff. decay exponentially fast
$f(z)$ entire $\implies$ decay faster than exponentially fast.
Trapezium rule + discrete Fourier coefficients
\[\theta_{j} = \frac{2\pi j}{n},\ j = 0,1,\dots,n\]Gives $n+1$ evenly spaced points over $[0,2\pi]$
Definition 32. (Trapezium rule)
Trapezium rule over $[0,2\pi]$
\[\int_{0}^{2\pi} f(\theta) { d}\theta \approx {2 \pi \over n} \left[{f(0) \over 2} + \sum_{j=1}^{n-1} f(\theta_j) + {f(2 \pi) \over 2} \right]\]$f$ periodic; $f(0) = f(2\pi)$
\[\implies \int_{0}^{2\pi} f(\theta) { d}\theta \approx 2 \pi\underbrace{\frac{1}{n} \sum_{j=0}^{n-1} f(\theta_j)}_{\sum_{n}[f]}\]Define Trapezium rule approximation to Fourier coeffs by
\[\hat{f}_k^n := \sum_n[f(\theta) { e}^{-i k \theta}] = \frac{1}{n} \sum_{j=0}^{n-1} f(\theta_j) { e}^{-i k \theta_j}\]Lemma. (Discrete Orthogonality)
We have:
In other words,
\[\sum_n[{ e}^{i (k-j) \theta_j}] = \begin{cases} 1 & k-j = \ldots,-2n,-n,0,n,2n,\ldots \cr 0 & \hbox{otherwise} \end{cases}.\]Theorem 16. (Discrete Fourier coefficients)
$f$ absolutely convergent
\[\implies\hat{f}_k^n = \dots +\hat{f}_{k-2n} +\hat{f}_{k-n} +\hat{f}_k +\hat{f}_{k+n} +\hat{f}_{k+2n} + \dots\]Corollary. (Aliasing)
$\forall p \in \mathbb{Z},\hat{f}k^n =\hat{f}{k+pn}^n$.
If we know $\hat{f}{0}^{n},\dots,\hat{f}{n-1}^{n} \implies$ we know $\hat{f}^{n}_{k}$ $\forall k$ via permutations.
e.g $n = 2m+1$
Take Case: Taylor (all neg. coeffs = 0)
Let $z = e^{i\theta}$
$\hat{f}{0}^{n},\dots,\hat{f}{n-1}^{n}$ approx. of Taylor series coeffs. by evaluating on the boundary.
Theorem 17. (Taylor series converge)
$0 = \hat{f}{-1} = \hat{f}{-2} = \dots$ and $\mathbf{\hat{f}}$ absolutely convergent
\[\implies f_n(\theta) = \sum_{k=0}^{n-1} \hat{f}_k^n {e}^{ i k \theta} \quad \text{ converges uniformly to } f(\theta)\]Discrete Fourier Transform and Interpolation
Definition 33. (DFT)
Defined as:
\[\begin{aligned} Q_n &:= \frac{1}{\sqrt{n}}\begin{bmatrix} 1 & 1 & 1& \dots & 1 \\ 1 & { e}^{-i \theta_1} & { e}^{-i \theta_2} & \dots & { e}^{-i \theta_{n-1}} \\ 1 & { e}^{-i 2 \theta_1} & { e}^{-i 2 \theta_2} & \dots & { e}^{-i 2\theta_{n-1}} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & { e}^{-i (n-1) \theta_1} & { e}^{-i (n-1) \theta_2} & \dots & { e}^{-i (n-1) \theta_{n-1}} \end{bmatrix} = \frac{1}{\sqrt{n}} \begin{bmatrix} 1 & 1 & 1& \dots & 1 \\ 1 & \omega^{-1} & \omega^{-2} & \dots & \omega^{-(n-1)}\\ 1 & \omega^{-2} & \omega^{-4} & \dots & \omega^{-2(n-1)}\\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & \omega^{-(n-1)} & \omega^{-2(n-1)} & \dots & \omega^{-(n-1)^2} \end{bmatrix} \quad \left(\omega = e^{i\pi/n}\right)\\ Q_n^{\ast} &= \frac{1}{\sqrt{n}} \begin{bmatrix} 1 & 1 & 1& \dots & 1 \\ 1 & { e}^{i \theta_1} & { e}^{i 2 \theta_1} & \dots& { e}^{i (n-1) \theta_1} \\ 1 & { e}^{i \theta_2} & { e}^{i 2 \theta_2} & \dots& { e}^{i (n-1)\theta_2} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & { e}^{i \theta_{n-1}} & { e}^{i 2 \theta_{n-1}} & \dots& { e}^{i (n-1) \theta_{n-1}} \end{bmatrix} = \frac{1}{\sqrt{n}} \begin{bmatrix} 1 & 1 & 1& \dots & 1 \\ 1 & \omega^{1} & \omega^{2} & \dots& \omega^{(n-1)}\\ 1 & \omega^{2} & \omega^{4} & \dots& \omega^{2(n-1)}\\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & \omega^{(n-1)} & \omega^{2(n-1)} & \dots& \omega^{(n-1)^2} \end{bmatrix}\end{aligned}\]Such that we have
\[\underbrace{\begin{bmatrix} f_0^n \\ \vdots \\ f_{n-1}^n \end{bmatrix}}_{\mathbf{\hat{f}}^{n}} = \frac{1}{\sqrt{n}} Q_n \underbrace{\begin{bmatrix} f(\theta_0) \\ \vdots \\ f(\theta_n) \end{bmatrix}}_{\mathbf{f}^{n}}\]Proposition - (DFT is Unitary)
$Q_n$ is unitary: $Q_n^{\ast} Q_n = Q_n Q_n^{\ast} = I$.
$\implies$ easily inverted with map from DFT $\to$ values
Corollary
$f_n(\theta)$ interpolates $f$ at $\theta_j$
Fast Fourier Transform
$Q_n, Q_n^{\ast}$ applied take $O(n^2)$ operations, reduced to $O(n\log n)$ with FFT
\[\omega_n = \exp(\frac{2\pi}{n}); \quad \underbrace{\begin{bmatrix} 1 \\ \omega_{2n} \\ \vdots \\ \omega_{2n}^{2n-1} \end{bmatrix}}_{\vec{\omega}_{2n}} = P_{\sigma}^{T} \begin{bmatrix} I_n \\ \omega_{2n} I_n \end{bmatrix} \underbrace{\begin{bmatrix} 1 \\ \omega_n \\ \vdots \\ \omega_n^{n-1} \end{bmatrix}}_{\vec{\omega}_n}\] \[\text{ For } \sigma = \begin{pmatrix} 1 & 2 & 3 & \dots & n & n+1 & \dots & 2n \\ 1 & 3 & 5 & \dots & 2n-1 & 2 & \dots & 2n \end{pmatrix}\]$\sigma$ being the permutation that takes:
Even entries $\to$ first $n$ entries
Odd entries $\to$ last $n$ entries
With $P_{\sigma}^{T}$ reversing that process.
\(\begin{aligned} \implies Q_{2n}^{\ast} &= {1 \over \sqrt{2n}} \begin{bmatrix} \mathbf{1}_{2n} | \vec{\omega}_{2n} | \vec{\omega}_{2n}^2 | \dots | \vec{\omega}_{2n}^{2n-1} \end{bmatrix} = {1 \over \sqrt{2n}} P_{\sigma}^{T} \begin{bmatrix} \mathbf{1}_{n} & \vec{\omega}_n & \vec{\omega}_n^2 & \dots & \vec{\omega}_n^{n-1} & \vec{\omega}_n^n & \dots & \vec{\omega}_n^{2n-1} \\ \mathbf{1}_{n} & \omega_{2n} \vec{\omega}_n & \omega_{2n}^2 \vec{\omega}_n^2 & \dots & \omega_{2n}^{n-1} \vec{\omega}_n^{n-1} & \omega_{2n}^n \vec{\omega}_n^n & \dots & \omega_{2n}^{2n-1} \vec{\omega}_n^{2n-1} \end{bmatrix} \\ &= {1 \over \sqrt{2}} P_{\sigma}^{T} \begin{bmatrix} Q_n^{\ast} & Q_n^{\ast} \\ Q_n^{\ast} D_n & -Q_n^{\ast} D_n \end{bmatrix} = {1 \over \sqrt{2}}P_{\sigma}^{T} \begin{bmatrix} Q_n^{\ast} \\ &Q_n^{\ast} \end{bmatrix} \begin{bmatrix} I_n & I_n \\ D_n & -D_n \end{bmatrix}\end{aligned}\) Can reduce DFT to 2 DFTs applied to vectors of half dimension.
For $n = 2^{q} \implies O(n\log n)$ opperations.\
Orthogonal polynomials
Consider expansions of the form \(f(x) = \sum_{k=0}^{\infty}c_k p_k(x) \approx \sum_{k=0}^{n-1}c_k^{n} p_k(x)\) For:
$p_{k}(x)$ - special families of polynomials
$c_k$ - expansion coefficients
$c_{k}^{n}$ - approximate coefficients
General properties of orthogonal polynomials
Definition 34. (Graded polynomial basis)
Set of polynomials; ${p_0(x), p_1(x), \dots }$ if $p_n$ is precisely degree $n$
\[p_n(x) = k_n x^n + k_n^{(n-1)} x^{n-1} + \dots + k_n^{(1)} x + k_n^{(0)}\]If $p_n$ graded $\implies {p_0(x), \dots, p_n(x) }$ a basis of all polynomials of degree $n$
Definition 35. (Orthogonal polynomial)
Given integrable weight $w(x)$ for $x \in (a,b)$, define continuous inner product
\[\left < f,g\right > = \int_a^b f(x) g(x) w(x) d x\]Graded polynomial basis ${p_0(x), p_1(x), … }$ are orthogonal polynomials (OPs) if
\[⟨p_n,p_m⟩ = 0 \quad \text{when } m \neq n\]Definition 36. (Orthonormal polynomials)
A set of OPs ${p_0(x), p_1(x), … }$ orthonormal if $|q_n| = 1\ \forall n$
Definition 37. (Monic OP)
A set of OPs ${p_0(x), p_1(x), … }$ monic if $k_n = 1$
Proposition - (Expansion)
If $r(x)$ a degree $n$ poly., ${p_n}$ orthogonal and ${q_n}$ orthonormal $\implies$
\[\begin{aligned} r(x) &= \sum_{k=0}^n {⟨p_k,r⟩ \over \|p_k\|^2} p_k(x) \\ & = \sum_{k=0}^n ⟨q_k,r⟩ q_k(x)\end{aligned}\]Corollary - Zero inner product
If degree $n$ polynomial $r$ satisfies
Corollary - (Uniqueness)
Monic OPs are unique
Proposition - Orthogonal to lower degree
Given weigth $w(x)$, polynomial $p$ of precisely degree $n$ satisfies
$\forall$ degree $m<n$, polynmial $r \iff p(x) = ap_n(x)$ where $p_n(x)$ are monic OPs.
$\implies$ OP uniquely defines by $k_n$
3-term Recurrence
Theorem 18. (3-term recurrence, 2nd form)
If ${p_n}$ are OPs $\implies \exists a_n, b_n \neq 0,c_{n-1} \neq 0 \in \mathbb{R}$ s.t
\[\begin{aligned} x p_0(x) &= a_0 p_0(x) + b_0 p_1(x) \\ x p_n(x) &= c_{n-1} p_{n-1}(x) + a_n p_n(x) + b_n p_{n+1}(x)\end{aligned}\]$p_n$ monic $\implies xp_n$ monic
Corollary - (monic 3-term recurrence)
If ${p_n}$ are monic $\implies b_n = 1$.
Jacobi Matrix
Corollary - (Jacobi Matrix)
For
More generally, for any polynomial $a(x)$ we have
\[a(x) P(x) = P(x) a(X).\]Corollary - (Orthonormal 3-term recurrence)
${q_n}$ are orthonormal $\implies$ recurrence coefficients satisfy $c_n = b_n$.
The Jacobi matrix is symmetric:
Remark
Typically Jacobi matrix is the transpose $J := X^{T}$.
If the basis orthonormal $\implies$ $X$ is symmetric and they are the same.
Classical Orthogonal Polynomials
Classic OPs special families of OPs with special properties
Their derivatives are also OPs
They are eigenfunctions of simple differential operators
We consider:
Chebyshev polynomials (1st kind) $T_n(x)$:
$w(x) = 1/\sqrt{1-x^2}$ on $[-1,1]$.Chebyshev polynomials (2nd kind) $U_n(x)$:
$w(x) = \sqrt{1-x^2}$ on $[-1,1]$.Legendre polynomials $P_n(x)$:
$w(x) = 1$ on $[-1,1]$.Hermite polynomials $H_n(x)$:
$w(x) = \exp(-x^2)$ on $(-\infty,\infty)$
Other important families discussed are
Ultraspherical polynomials
Jacobi polynomials
Laguerre polynomials
Chebyshev
Definition 38. (Chebyshev polynomials, 1st kind)
$T_n(x)$ are orthogonal with respect to $1/\sqrt{1-x^2}$ and satisfy:
\[T_0(x) = 1, T_n(x) = 2^{n-1} x^n + O(x^{n-1})\]Definition 39. (Chebyshev polynomials, 2nd kind)
$T_n(x)$ are orthogonal with respect to $1/sqrt{1-x^2}$.
\[U_n(x) = 2^n x^n + O(x^{n-1})\]Theorem 19. (Chebyshev T are $\cos$)
\[T_n(x) = \cos (n \cdot acos x) \quad T_n(cos(\theta)) = \cos n \theta.\]Corollary
\[\begin{aligned} x T_0(x) = T_1(x) \\ x T_n(x) = {T_{n-1}(x) + T_{n+1}(x) \over 2}\end{aligned}\]Chebyshev polynomials particularly powerful
\[f(x) = \sum_{k = 0}^{\infty}\check{f}_k T_k(x), \quad f(x) = \sum_{k = 0}^{\infty}\check{f}_k \cos (k\theta)\]$\implies$ coefficients recovered fast using FFT-based techniques.
Theorem 20. (Chebyshev U are $\sin$)
For $x = \cos \theta$,
\[U_n(x) = {\sin(n+1) \theta \over \sin \theta}\]which satisfy:
\[\begin{aligned} x U_0(x) &= U_1(x)/2 \\ x U_n(x) &= {U_{n-1}(x) \over 2} + {U_{n+1}(x) \over 2}.\end{aligned}\]Legendre
Definition 40. (Pochammer symbol)
The Pochammer symbol is
\[\begin{aligned} (a)_0 &= 1 \\ (a)_n &= a (a+1) (a+2) \dots (a+n-1).\end{aligned}\]Definition 41. (Legendre)
Legendre polynomials $P_n(x)$ are OPs w.r.t $w(x) = 1$ on $[-1,1]$, with
\[k_n = {2^n (1/2)_n \over n!}\]Theorem 21. (Legendre Rodriguez formula)
\[P_n(x) = {1 \over (-2)^n n!}{d^n \over d x^n} (1-x^2)^n\]Lemma - (Legendre monomial coefficients)
\[\begin{aligned} P_{0}(x) &= 1\\ P_{1}(x) &= x\\ P_{n}(x) &= \underbrace{\frac{(2n)!}{2^n (n!)^2}}_{k_n}x^n - \underbrace{\frac{(2n-2)!}{2^n (n-2)!(n-1)!}}_{k_n^{(2)}} x^{n-2} + O(x^{n-4})\end{aligned}\]Theorem 22. (Legendre 3-term recurrence)
\[\begin{aligned} xP_0(x) &= P_1(x)\\ (2n+1)xP_n(x) &= nP_{n-1}(x) + (n+1)P_{n+1}(x)\end{aligned}\]Interpolation and Gaussian Quadrature
Polynomial Interpolation - process of finding poly. equal to data at precise set of points
Quadrature - act of approximating an integral by a weighted sum \(\int_{a}^{b}f(x)w(x)dx \approx \sum_{j=1}^{n}w_j f(x_j)\)
Polynomial Interpolation
Given $n$ distinct points $x_1,\dots,x_n \in \mathbb{R}$, $n$ samples $f_1,\dots,f_n \in \mathbb{R}$
Degree $n-1$ interpolatory poly. $p(x)$ satisfies \(p(x_j) = f_j\)
Definition 42. (Vandermonde)
The Vandermonde matrix associated with $n$ distinct points $x_1,…,x_n \in \mathbb{R}$ is the matrix \(V := \begin{bmatrix} 1 & x_1 & \dots & x_1^{n-1} \\ \vdots & \vdots & \ddots & \vdots \\ 1 & x_n & \dots & x_n^{n-1} \end{bmatrix}\)
Proposition - (Interpolatory polynomial uniqueness)
Interpolatory polynomial is unique and Vandermonde matrix is invertible
Definition 43. (Lagrange basis polynomial)
\[\ell_k(x) := \prod_{j \neq k} {x-x_j \over x_k - x_j} = {(x-x_1) \dots(x-x_{k-1})(x-x_{k+1}) \dots (x-x_n) \over (x_k - x_1) \dots (x_k - x_{k-1}) (x_k - x_{k+1}) \dots (x_k - x_n)}\]Proposition - (Delta interpolation)
\[\ell_k(x_j) = \delta_{kj}\]Theorem 23. (Lagrange Interpolation)
The unique polynomial of degree at most $n-1$ that interpolates $f$ at $x_j$ is
\[p(x) = f(x_1) \ell_1(x) + \dots + f(x_n) \ell_n(x)\]Roots of orthogonal polynomials and truncated Jacobi matrices
Lemma
$q_n(x)$ has exactly $n$ distinct roots
Definition 44. (Truncated Jacobi Matrix)
Given a symmetric Jacobi matrix $X$, (or weight $w(x)$ with orthonormal polynomials associated with $X$) the truncated Jacobi matrix is
\[X_n := \begin{bmatrix} a_0 & b_0 \\ b_0 & \ddots & \ddots \\ & \ddots & a_{n-2} & b_{n-2} \\ && b_{n-2} & a_{n-1} \end{bmatrix} \in \mathbb{R}^{n \times n}\]Lemma - (Zeros)
The zeros $x_1, \dots,x_n$ of $q_n(x)$ are the eigenvalues of the truncated Jacobi matrix $X_n$.
for the orthogonal matrix
\[Q_n = \begin{bmatrix} q_0(x_1) & \dots & q_0(x_n) \\ \vdots & \ddots & \vdots \\ q_{n-1}(x_1) & \dots & q_{n-1}(x_n) \end{bmatrix} \begin{bmatrix} \alpha_1^{-1} \\ & \ddots \\ && \alpha_n^{-1} \end{bmatrix}\]where $\alpha_j = \sqrt{q_0(x_j)^2 + \dots + q_{n-1}(x_j)^2}$.
Interpolatory Quadrature Rules
Definition 45. (interpolatory quadrature rule)
Set of points $\mathbf{x} = [x_1,\dots,x_n]$ the interpolatory quadrature rule is:
\[\Sigma_n^{w,\mathbf{x}}[f] := \sum_{j=1}^n w_j f(x_j) \quad \text{where} \quad w_j := \int_a^b \ell_j(x) w(x) dx\]Proposition - (Interpolatory quadrature is exact for polynomials)
Interpolatory quadrature is exact for all degree $n-1$ polynomials $p$:
Gaussian Quadrature
Definition 46. (Gaussian Quadrature)
Given weight $w(x)$, the Gauss quadrature rule is:
\[\int_a^b f(x)w(x) dx \approx \underbrace{\sum_{j=1}^n w_j f(x_j)}_{\Sigma_n^w[f]}\]where $x_1,\dots,x_n$ are the roots of $q_n(x)$ and
\[w_j := {1 \over \alpha_j^2} = {1 \over q_0(x_j)^2 + \dots + q_{n-1}(x_j)^2}.\]Equivalently, $x_1,\dots,x_n$ are the eigenvalues of $X_n$ and
\[w_j = \int_a^b w(x) dx Q_n[1,j]^2.\](Note we have $\int_a^b w(x) dx q_0(x)^2 = 1$.)
Lemma - (Discrete orthogonality)
For $0 \leq \ell,m \leq n-1$,
Theorem 24. (Interpolation via quadrature)
\[f_n(x) = \sum_{k=0}^{n-1} c_k^n q_k(x)\quad \text{ for } \quad c_k^n := \Sigma_n^w[f q_k]\]interpolates $f(x)$ at the Gaussian quadrature points $x_1,\dots,x_n$.
Corollary
Gaussian quadrature is an interpolatory quadrature rule with the interpolation points equal to the roots of $q_n$:
Theorem 25. (Exactness of Gauss quadrature)
If $p(x)$ is a degree $2n-1$ polynomial then Gauss quadrature is exact:
\[\int_a^b p(x)w(x) dx = \Sigma_n^w[p].\]